Jaren terug kocht ik een GPS logger: zo’n klein apparaatje dat niet helpt om te weten waar je bent maar wel om terug te vinden waar je was. Mits je voldoende goed wist waar je was en vervolgens de weg naar huis en de PC hebt weten te vinden.
In dit verhaal: “Stuk”, over hoe een defecte Qstarz te repareren, “Vol” over de juiste instellingen voor een lange race, en “Leeg” over het uitlezen van de logger als de originele software daar faalt.
Aanleiding was dat ik had gelezen dat je geen GPS met scherm mocht gebruiken bij oriëntatiewedstrijden, maar dat ik wel wilde weten waar ik had gelopen en hoe snel. Dus geen Garmin met kaarten, in de hand, maar ook geen GPS om de pols die een kruimelspoor laat zien, en formeel ook geen hardloophorloge waarop je de afgelegde meters kan zien. Hoewel ik nog geen wedstrijd heb meegemaakt waar dat laatste niet werd toegestaan, en nog geen situatie heb meegemaakt waar het kijken op mijn horloge voordeel had opgeleverd. Maar goed. Ik kocht een tracklogger.
Er zijn overigens wel meer voordelen ten opzichte van een hardloophorloge met GPS, en de belangrijkste daarvan is de levensduur van de batterij en de capaciteit van het geheugen. Er is simpelweg geen horloge dat daar aan kan tippen. Noem maar eens een ander apparaat dat 32 uur continue elke seconde een locatie kan opslaan zonder tussentijds uitlezen en opladen. Heb je dat nodig dan? Ja, ik wel. Soms.
Dus, omdat ik niet kon kiezen en de verschillen wilde onderzoeken kocht ik …
Maar dat kwam doordat ik nog niet de specifieke voor- en nadelen realiseerde. Een GPS hardloophorloge gebruik je voor trainingen en wedstrijden van hooguit een paar uur, voor de routineuze loopjes waarbij je snel je tracks wilt downloaden, uploaden, en analyseren. Het moet vooral praktisch zijn; liefst zet je horloge de handel direct op Strava zodra er WiFi in de buurt is. En ik heb, zoals gezegd, nog geen wedstrijd meegemaakt waar mijn TomTom Multi-sport Cardio of mijn Garmin Forerunner 305 verboden was.
En voor de langere wedstrijden, zoals Adventure Races en Orienteering Challenges van 8 uur of langer, is een GPS logger ideaal vanwege zijn uithoudingsvermogen en formaat, en daarbij is bij die lange afstanden -veelal over paden- de sub-meter-nauwkeurigheid minder belangrijk voor het analyseren van de tracks in Quickroute dan voor korte urban sprints. Dus voor elke toepassing heb ik het ideale apparaat. Min of meer.
Stuk
Naar tevredenheid gebruikte ik de dingen waar ze voor bedoeld waren, naar mijn mening, tot er wat stuk ging. Als eerste begaf de iGotU het. Dat was dat witte apparaatje. Niets meer. Geen verbinding met de PC, niet meer laden, geen garantie. Nou was ik daar toch al het minste over te spreken wat betreft nauwkeurigheid, maar het was een handig ding om na een dagje skiles van de kinderen te zien waar ze allemaal geweest waren. Maar toen de Qstarz er mee ophield was ik meer van mijn stuk gebracht. Hij was niet meteen helemaal dood, maar wilde niet meer opladen en communiceren met de PC. Openmaken en kijken wat er in zit is al sinds jongs af aan een hobby van me, maar ik vond het euvel zelf niet meteen en ook online schoot men niet te hulp toen ik mijn verhaal deed op Circuitsonline.
Probleem
Het probleem van het niet-opladen was betrekkelijk: de accu is de Qstarz BT Q1000xt is gelijk aan een Nokia BL-6C, en laat die nou net in mijn prehistorische Nokia 2700 Classic passen, zodat ik de accu ook buiten de GPS logger om kan opladen. Maar zonder uitlezing heb je er nog niet veel aan. Tijd voor wat meer expertise. Laat ik nou toevallig de beschikking hebben over een 2e Qstarz van het zelfde type omdat ik m’n vader er jaren eerdere een cadeau had gedaan om zijn fotoverzameling te geo-taggen. En door de signalen op de printbanen van de twee, de werkende en de defecte, te vergelijken kan ik vaststellen waar een essentiële afwijking zit. Het blijkt eenvoudiger dan gedacht. Even voorbij de ingang van de USB-voedingssignalen valt de spanning weg. Een minuscuul onderdeel, ter grootte van een zandkorrel (een of ander SMD-component) onderbreekt de stroomkring waardoor er niet meer opgeladen wordt, en -vreemd genoeg- ook niet meer met de PC gepraat als de logger daarop wordt aangesloten. En het uitlezen van het geheugen van de logger gaat niet via bluetooth, helaas. Dus het probleem moet wel verholpen worden, of het gadget kan het raam uit.
Weer vergelijk ik de twee loggers, maar nu door het betreffende component op het werkende exemplaar door te meten. Hij lijkt een weerstand van 0 Ω te zijn. Dat kan maar een paar dingen betekenen. Of het is een shunt weerstand die gebruikt wordt om de laadstroom te meten (maar dat lijkt me in dit geval vrij nutteloos), of het is een draadbrug die als discreet component is uitgevoerd omdat er niet genoeg ruimte of lagen in de PCB printsporen beschikbaar waren (maar gezien de ruime plaatsing van de onderdelen is dat ook niet aannemelijk), of het is een zekering. En dat laatste ligt nog wel het meest voor de hand. En ook waarom dan juist dat onderdeel in de kapotte logger defect is.
En ik heb zo mijn hypothese hoe dat komt: in de goede oude tijd, vroegâh, za’k maar zeggen, waren er nog geen USB laders die 2 A of meer uitspuugden. 500mA, daar hield het mee op, netjes gereguleerd door de USB host in de PC. Maar nu USB de de facto standaard is voor het opladen van phones en tablets, is die limiet opgerekt. Mijn GPS logger verwacht dat niet, en gaat uit van een externe begrenzing bij het laden van de interne accu. Maar als de stroom nu ineens niet meer begrensd wordt en de accu kan trekken wat die wil, brandt de zekering door. Want kennelijk heeft wel iemand bedacht dat onbegrensde stromen niet goed zijn.
De vervangende zekering zit met twee draadjes op het printje gesoldeerd omdat dat in de toekomst makkelijker te vervangen is, en bovendien de nieuwe zekering helemaal niet paste op de oorspronkelijk plek. Maar het werkt wel.
Oplossing
Dus, nu was het defect en de oorzaak daarvan gevonden. De oplossing is simpelweg de doorgebrande zekering vervangen door een draadje, en gaan met die banaan. Of wacht, misschien zit die zekering er niet voor niets. Ik stop er een nieuwe in.
Dat werkte een maand, en toen was het oorspronkelijke probleem terug. Nogmaals openen van de GPS logger leerde dat de nieuwe zekering van 500 mA ook doorgebrand was. Oplossing 2 werd dan ook iets geavanceerder dan oplossing 1: een iets vrijgeviger zekering van 750 mA, en een sticker op de GPS logger dat hij niet aan een lader mag die meer dan 500 mA kan leveren. En zo doet hij het inmiddels al weer een jaar of 2.
Beknopte instructies indien logger niet laadt of praat:
Verwerf een SMD weerstand van 500 mA of 1 A (bijvoorbeeld).
Verwijder accu, en pruts behuizing open met behulp van een plectrum oid. De bovenkant moet naar buiten gebogen worden om de klem-palletjes los te maken.
Soldeer twee korte flexible dunne draadjes aan de zekering.
Soldeer de andere kanten van de draadjes aan de uiteinden van de minuscule zekering op de printplaat, zoals in de foto’s hier boven. Het is niet nodig de defecte zekering los te solderen, want die doet het toch niet meer. En de nieuwe heeft ook geen polariteit, dus hij kan ook niet verkeerd om zitten.
Zorg dat de nieuwe zekering niet in de weg zit bij het dichtmaken van de GPS logger.
Laad de logger op en ga er vervolgens 32 uur mee rennen. Stel vast dat het apparaat het langer volhoudt dan jij zelf.
Vol
Toen mijn logger het weer deed was het tijd om het geheugen te vullen. En dat lukte aardig, maar ik wist niet wanneer het precies vol zou zijn. Terwijl ik testte hoe lang de accu mee ging, onderzocht ik meteen ook maar hoeveel datapunten hij kon opslaan. En dit is wat ik vond:
Datapunten
Er kunnen standaard maximaal 230000 punten worden opgeslagen. Maar dat is wel afhankelijk van welke gegevens er bewaard worden. Met de bijgeleverde software Qtravel kan je een aantal gegevens weglaten of toevoegen. Het grappige is overigens dat je niet alles kan instellen, maar als je met een ander programma de gelogde gegevens aanpast, dat dan wel weer door Qtravel wordt weergegeven. Een ander programmaatje is bijvoorbeeld MTKutillity voor Android, of BT747, maar daarover later meer. Laten we niet afdwalen. Waar het om gaat is dat als je minder gegevens per gelogde positie opslaat, er simpelweg meer punten in het geheugen passen.
Als je je tot een minimum wilt beperken, en je snelheid en koers wel uit de posities en de tijd kan berekenen, heb je alleen tijd (6 bytes), lengte- (8) en breedtegraad (8), en hoogte (4), en dan is er nog een fixmode waarde (2), samen goed voor 28 bytes per punt. Daar kunnen dan ongeveer 330000 van worden opgeslagen, wat neerkomt op ongeveer 8 MB geheugen. Daar lach je nu om, met de huidige prijs van SD kaartjes; maar 10 jaar terug toen dit ding op de markt kwam was dat eigenlijk ook niet veel. Waarom ze er niet meer in hebben gestopt?
Let overigens op dat de diverse programma’s geen weet blijken te hebben van de grootte van het daadwerkelijke geheugen. Als de logger vol is (bij 58 bytes per punt) zegt BT747 “Memory used: 158993 pts (54%)”, terwijl er ergens anders staat “160059 records estimated”, wat niet consistent is. En intussen roept MTKutility per datapunt “58 bytes, max 72315 records”. Alleen die 160000 klopt ongeveer. En zo kom ik op 8 MB voor deze logger.
Gelogde gegevens
Het geheugen gebruik wat betreft track-opslag is vrij goed te voorspellen. Online kan je vinden hoeveel bytes elk punt vergt, bijvoorbeeld hier. En een app als MTKutillity of een programma als BT747 laat ook zien hoeveel bytes elk punt kost, terwijl je deze instellingen maakt. Maar voor wie het liever met de hand uitrekent heb ik de belangrijkste signalen hier onder opgesomd:
naam
bytes
omschrijving
UTC
6
datum en tijd (afgerond op hele secondes)
VALID
2
GPS status
LATITUDE
8
breedtegraad
LONGITUDE
8
lengtegraad
HEIGHT
4
hoogte [m]
SPEED
4
snelheid [km/h]
TRACK
4
koers [graden]
NSAT
2
aantal satellieten (zichtbaar, en gebruikt)
MILLISECOND
2
tijd, achter de komma
DISTANCE
8
afstand tussen punten
De tabel geeft aan per gelogd stukje informatie hoeveel bytes het in beslag neemt. Één byte is 8 bits, een bit is een één of een nul, en een nul is niks. Maar een byte wel en neemt op een chip uit de tijd dat de Qstarz BT-1000XT werd ontworpen iets van 1 triljoenste vierkante meter in. Het hele geheugen past dus op een een vijfde van een vierkante millimeter. Anyway, als je opslagruimte wilt besparen kan je de gelogde gegevens tot een minimum beperken: sla alleen de tijd, locatie, en hoogte op, dus UTC + LATITUDE + LONGITUDE + HEIGHT als de GPS een fix signaal heeft. De snelheid, helling, afstand en koers kan je dan uit deze vier gegevens afleiden.
Afgeleide gegevens
Is dat net zo nauwkeurig? Dat heb ik ook onderzocht. Als je de snelheid uitrekent op basis van de locatie (graden uit de logger heb ik eerst omgezet in UTM coördinaten, en daaruit heb ik de afstand tussen opeenvolgende punten berekend) en het tijdsinterval, komt er een redelijk signaal uit, dat aardig overeenkomt met de snelheid die de logger zelf heeft weggeschreven. Alleen is de blauwe lijn in de grafiek een stuk strakker dan de rode, de berekende. Kennelijk weet de GPS zijn snelheid beter dan zijn locatie. Of wacht: de locatie wordt maar in een beperkt aantal decimalen -cijfers achter de komma- opgeslagen. Misschien ligt het daar aan? Een regel uit de log bevat 51.322957,N,5.476575,E en dat betekent dat er tot op een miljoenste van een graad wordt gerekend. Op onze breedtegraad is dat 6.5 cm in de lengte en 11 cm in de lengterichting. Wat bij een interval van 1 sec neer komt op ongeveer 0.4 km/h. De ruis in de grafiek lijkt meer dan dat. Sterker nog, de standaarddeviatie van het verschil tussen gemeten en berekende snelheid is 1.4 km/h. Dus één van beide zit er naast. Opvallend genoeg is de door de GPS gemeten snelheid dikwijls lager dan de berekende snelheid, méér dan je op basis van de nauwkeurigheid van de graden-representatie zou verwachten. Een andere test, waarbij ik kijk naar de gelogd afstand tussen de punten, laat zien dat het dáár niet aan ligt; de door Pythagoras berekende afstand tussen elk paar punten is met een afwijking van hooguit 0.1 m, de verklaarbare afwijking, gelijk aan de door de GPS gelogde. Mijn conclusie is daarom dat de variatie in de tijd zit. Jitter op de regelmaat van de klok. Ik zou dat kunnen onderzoeken als ik ook de millisecondes van elk sample zou laten opslaan; het is me ook al opgevallen dat ik als ik de waarde van ‘fix every… ms’ op bijvoorbeeld 200 zet in plaats van 1000 (kan via BT747), er meerdere punten met dezelfde timestamp worden bewaard; het is dus niet zo dat er precies elke seconde iets gebeurt in het ding, het kan best vaker zijn, óf onregelmatiger. Je kan op die manier trouwens ook een BT-1000EX maken van de 1000XT, door hem op “fix every 100ms” te zetten, en “log every 1.0m”, en je krijgt bij snelheden boven 10 m/s een datapunt met een frequentie van 10 Hz. Maar ik vind het wel goed zo. Afhankelijk van waar ik de gegevens voor ga gebruiken zal ik de gemeten snelheid al dan niet opslaan, door de logger tevoren te configureren.
En de richting? Ook daar heb ik naar gekeken. Uit de vector van elk paar opgeslagen punten kan ik de richting berekenen(atan(dy/dx)) en die vergelijk met de gelogd koers, krijg je wat je ziet in deze grafiek:
Dat lijkt aardig te kloppen, qua trend, maar er zitten ook veel afwijkingen in. Idealiter zou het een strakke rechte lijn zijn (zoals de groene onderbroken lijn aangeeft) maar dat is dus niet zo. Alleen is het hier prima te verklaren uit de resolutie van de opgeslagen locatie waardes -het beperkte aantal cijfers achter de komma-. Bij lage snelheden zijn de afstanden tussen de punten relatief klein ten opzichte van de discretisatiestappen. En dat kan een enorme afwijking bij die punten opleveren voor de berekende koers.
Dus, moet je nou wél of niet de snelheid, koers en afstand opslaan? Het antwoord is simpel: waar ga je de gegevens voor gebruiken? Om de afhankelijkheid van de loopsnelheid ten opzichte van de helling van het terrein te bepalen, of om te kijken hoeveel effect een bochtig parcours heeft op het looptempo? Dan zou ik deze drie SPEED, TRACK en DISTANCE loggen. Om de route gevolgde op de kaart te plotten, en gewoon te zien waar je liep en hoe hard en hoe hoog, dan is tijd en locatie plus hoogte genoeg om alles met voldoende nauwkeurigheid uit te halen. Wat in elk geval niet werkt is uit de snelheid en richting de gelopen route bepalen, want dan kom je door opgestapelde afrondingsfouten heel ergens anders uit. Dus de locatie moet altijd onderdeel van de gelogde gegevens zijn.
Accu levensduur
Maar over het algemeen is het geheugen niet de beperkende factor, tenzij je een maand vakantie in één keer wilt loggen. Doorgaans is de batterij eerder leeg. De bijgeleverde batterij van het merk Helix (HX-N3650A-G) houdt het tussen de 34 en 38 uur vol; in de loop van de jaren gaat hij wat achteruit, wat te verwachten is. Een nieuwere Nokia BL-6C, uitwisselbaar, houdt het bijna 43 uur vol. Genoeg voor een bizar lange adventure race. Ik vroeg me alleen af of het nog uit maakt hoe vaak hij logt. Want allereerst kost het beschrijven van flash geheugen wat energie, dus hoe meer er gelogd wordt, hoe sneller de batterij leeg is, en ten tweede zou hij wel een in een slaapstand kunnen gaan tussen de punten in, als ik het update interval langer maak. Dus dat heb ik getest.
log interval
[s]
batterij levensduur
opgeslagen punten
1
37:35
135262
5
36:43
26443
10
37:32
13626
Accelerometer
De batterij gaat dus niet langer mee als je minder punten opslaat. Maar er is nog een andere mogelijkheid: selectief opslaan. De logger heeft een zogenaamde accelerometer, een versnellingsopnemer. Die kan de GPS wakker maken als hij beweging detecteert, nadat het apparaatje eerder in een slaapstand was gegaan omdat de snelheid onder een bepaalde waarde was gekomen gedurende een zekere tijd. Zo wordt én de batterij gespaard, én het aantal nutteloze datapunten beperkt. Een testje leerde dat hij op die manier een krappe 7 dagen kon loggen op 1 acculading (mits er niet te veel bewogen wordt, want dan moet het ding gewoon aan het werk).
Toch werkt de accelerometer een beetje vreemd, is mijn bevinding. Een paar keer loopt er een meting van ruim een uur terwijl de GPS min of meer stil staat. Maar meestal is dan wel de ontvangst slecht en schiet de positie heen en weer. Het lijkt er op dat hij op basis van de GPS detecteert dat hij beweegt (ten gevolge van ruis) en dus niet stil lijkt te staan. Maar als hij dan stilstand detecteert gaat hij inderdaad in slaap modus gaat, tot de accelerometer weer wat ziet gebeuren. Maar het duurt soms 12 seconden om een weer een GPS fix te krijgen, soms wat korter, soms langer. Maar meestal klopt het aardig. Een paar keer is het 1e punt dat wordt opgeslagen één km verderop, omdat dan de GPS error nog groot is. Maar dat kan je redelijk wegfilteren. Je mist in elk geval erg weinig punten met de accelerometer aan, en als het voorlaatst punt niet te lang geleden is gaat de positionering ook vloeiend over in de de volgende track omdat dan de GPS locatie nog nauwkeurig is. Dus dat principe werkt goed om accu te sparen, en vooral om geheugen vrij te houden.
Toepassingen en instellingen
Ik houd zelf de volgende instellingen aan voor de verschillende toepassingen:
toepassing
maximale tijd / afstand
afstand ≥
tijd ≥
snelheid ≥
accelerometer
Oriëntatieloop
95 uur / 340 km
1 m
1 sec
0
off
Adventure race
95 uur / 685 km
2 m
1 sec
0
off
Week skiën
190 uur / 685 km
2 m
2 sec
3 km/h
on
Zomervakantie met auto
39 dagen / 6800 km
20 m
10 sec
5 km/h
on
Analyse (incl. extra data)
54 uur / 190 km
1 m
1 sec
0
off
Ik ben in de tabel uitgegaan van een dataset met UTC, LATITUDE, LONGITUDE, HEIGHT (in totaal 26 bytes) en voor een Analyse daarnaast nog VALID, SPEED, TRACK, DISTANCE, MILLISECOND (in totaal 46 bytes).
Leeg
Een enkele keer gaat er iets fout. Ik heb wel eens na een activiteit bij het inlezen van de track in QTravel de melding gekregen dat er helemaal niets te downloaden viel. Dat is heel onthutsend; ga je die race van 32 uur nog een keer overdoen omdat de tracklog ontbreekt? Dat kan toch niet? Mijn vermoeden was dat de gegevens wel opgeslagen waren maar dat de software ze niet meer kon lezen.
En dat bleek te kloppen. Kennelijk stond er ergens een bitje verkeerd waardoor de bijgeleverde software geen kaas meer kon maken van de data. Maar er zijn alternatieven, zoals de eerder genoemde BT747 of diverse Anddroid apps. Mijn favoriet op de PC is BT747 vanwege de veelzijdigheid -maar je kan ook weer verdwalen in het aantal opties-, terwijl MTKutility op de smartphone wel weer erg handig is om onderweg tijdens een vakantie een tracklog op te slaan voor als het geheugen onverhoopt vol loopt.
Met BT747 is het me tot nu toe altijd gelukt om alles dat opgeslagen was terug te halen en op te slaan voor verdere bewerking.
QTravel
Dit is de bijgeleverde software, die je ook los kan downloaden. Alleen heb je een product-key nodig om het te gebruiken, dus zonder een Qstarz logger heb je er niet veel aan. Het is wel de enige mogelijkheid die ik heb gevonden om een schema in te stellen van hoe laat tot hoe laat en op welke dagen van de week de logger actief moet zijn. Maar om alle logging opties in te kunnen stellen heb je weer andere, zoals onderstaande, software nodig.
BT747
Een handig PC tool om alle instellingen aan te passen en data over te halen en op te slaan. Bij mij werkt op Win7-64 de 64 bit versie niet; alleen de 32 bit versie is in staat verbinding te maken met de GPS logger.
MTKutility
Er zijn meerdere Android apps om met een MTK tracklogger als de Qstarz BT-1000XT te praten, maar mijn ervaring is dat ze niet allemaal even stabiel werken. En deze app werkt bij mij perfect om de instellingen te wijzigen, en de data over te halen. Installatie via Google Play Store.
GPSbabel
GPSbabel is het Zwitsers zakmes voor verwerking van GPS data, en het kan ook direct met een aantal apparaten praten. Ik heb eens onderstaande batch file geschreven die eerst opzoekt via welke COM poort de GPS logger is verbonden en dan een track inleest en opslaat. Zo maak ik mijzelf overbodig, en heb ik meer tijd om te lopen. Wel heb ik eerst een versie van devcon.exe en sed.exe, en natuurlijk gpsbabel.exe geinstalleerd. Allemaal makkelijk online te vinden.
@echo off bin\devcon find * | bin\sed -n "s/.*GPS.*(COM\(.*\))/set gpsport=\1/p" > %temp%/gpsport.cmd call %temp%/gpsport.cmd echo GPS verbonden met %gpsport%.
rem Windows datum format doet er toe! Moet staan op dd-MM-yyyy rem set trackdatum_=%date:~10,4%%date:~7,2%%date:~4,2% set trackdatum_=%date:~6,4%%date:~3,2%%date:~0,2% set trackdatum= set /p trackdatum= Wat is de datum (in formaat YYYYMMDD; default %trackdatum_%)? if "%trackdatum%"=="" set trackdatum=%trackdatum_% set /p loper= Wat is je naam (zonder spaties)? set /p omloop= Hoe heet de omloop (zonder spaties)? set datadirectory= set datadirectory_=\tracks set /p datadirectory= Waar wil je de files opslaan (%datadirectory_%)? if "%datadirectory%"=="" set datadirectory=%datadirectory_%
set gpsfile= %datadirectory%\%trackdatum%_%omloop%_%loper%.gpx echo Opslaan GPS data in %gpsfile%; even geduld...
Dit is een levend document. Vermoedelijk ga ik hier nog een en ander bij schrijven en verbeteren. Dus als je geïnteresseerd bent, houd deze pagina dan in de gaten. Je kan je aanmelden voor updates per email via onderstaande link:
En mocht je aanvullingen of verbeteringen hebben, schroom niet om die hier onder via een opmerking achter te laten, of neem direct contact met mij op.
Een tijd geleden heb ik al eens verteld over de kaarthouder die ik heb gemaakt voor op mijn mountainbike. Dat was in mijn verhaaltje over the hARz adventure race. Ik was zelf aan het knutselen geslagen, niet om geld te besparen, maar om iets te maken dat helemaal aan mijn wensen zou voldoen. En dat waren:
draaibaar: ik wil als oriënteur mijn kaart kunnen draaien zodat de voorliggende koers naar voren wijst
stevigheid: een constructie die niet afbreekt bij een val
flexibiliteit: een constructie geen verwondingen oplevert bij een val
stabiliteit: niet trillen bij een hobbelpad
niet magnetisch: zodat mijn kompas niet verstoord wordt als ik het op de kaart houdt
demontabel: de kaarthouder moet van de fiets af kunnen, en de plank waar ik de kaart op bevestig moet eenvoudig van de houder kunnen worden genomen zodat ik die bij een loop-etappe los mee kan nemen
lichtgewicht: logisch
automatisch met het noorden meedraaiend zodat de kaart altijd vanzelf goed georiënteerd is
De één na laatste wens is niet helemaal uitgekomen, en de laatste was niet helemaal reëel. Ik heb het wel geprobeerd, en ik had zowaar een elektronisch kompas met een motortje gekoppeld en een setpoint volger gebouwd, maar echt praktisch was dat nou ook weer niet. Aan de overige eisen is aardig voldaan.
Versie 1.0. Dodelijk stevig.
In eerste instantie was de constructie veel te stevig. De aluminium koker zou bij een over-de-kop-val voor lelijke verwondingen hebben gezorgd. Dus die is het nooit geworden. Trillen deed hij niet. Maar ja…
Versie 2.0. Deze heb ik getest in de Harz.
Versie 2.0 was flexibeler, en lichter bovendien. Een spiraalveer onder het kaartbord met een instelbare schroef om de voorspanning te regelen zorgde voor een soepele, maar gecontroleerde draaibaarheid. Maar na de proefrit in de Harz vond ik toch dat hij wat te veel trilde op hobbelige paadjes. Het was lastig de kaart te lezen tijdens het rijden, en het maakte een irritant rammel-geluid.
Als je naar de constructie zie je ook wel wat er mis is: zijn sterkte, dat hij zo slap is dat hij bij een val meegeeft, is meteen ook zijn zwakte, waardoor hij sterk trilt. Een plat plaatvormig object, zoals een aluminium strip, is sterk ín zijn vlak, maar flexibel úít het vlak. Denk maar aan een velletje papier. Daar kan je best hard aan trekken, maar vouwen gaat des te makkelijker.
Versie 2.0, trilt volgens een simulatie op 60 Hz (zonder kaartplank en kaart).
Ik heb een simulatie gemaakt van de kaarthouder. Weliswaar zonder kaartplank en kaart er op, waardoor hij in de computer een stuk lichter is dan in werkelijkheid, maar het geeft wel duidelijk aan wat de slappe beweging is. Ik heb hier Comsol voor gebruikt, een zogenaamd multi-physics FEM of eindige-elementen pakket, dat de constructie opdeelt in allemaal eenvoudig te behappen vier-hoekige stukjes metaal en zo iets complex als deze constructie van gebogen strips kan analyseren en vertellen wat en hoe er getrild wordt. En nog veel meer, zoals hoe goed het warmte geleidt, hoeveel inductiestromen het aardmagnetisch veld er in opwekt als ik de bocht om ga, noem maar op, maar het was me nu even om het trillen te doen. Dan vraag je het pakket de eigenmodes uit te rekenen, en dan krijg de de trillingen terug en hun frequenties, waarin het voorwerp gaat bewegen als je er een klap op geeft. Dat zijn er overigens oneindig veel, denk maar aan de snaar van een gitaar die ook allerlei boventonen heeft, maar de eerste is meestal, ook hier, de overheersende.
Als ik in het model wel de kaartplank en kaart had meegenomen was de 60 Hz die ik met de computer vond wel een stuk lager geworden. Ik heb met de versnellingsopnemer in mijn telefoon gemeten dat ik last had van 25 Hz. Dat zou goed kunnen kloppen. Maar hoe verbeter ik dat nou, zonder de hele houder veel zwaarder te maken, zonder de hele constructie aan te passen, en zonder hem weer zo solide te maken dat hij niet meer makkelijk meegeeft bij een val er bovenop?
En dat is nou juist het leuke van een computersimulatie: ja kan heel makkelijk iets aanpassen en zien wat het effect er van is. Maar eerst moet je wel een oplossingsrichting kiezen, want de computer doet niet zomaar iets briljants uit zichzelf.
Als je een velletje papier rechtop op tafel zet, en de onderkant vasthoudt, valt het om, of althans, het buigt dubbel en valt slap neer. Maar als je er een koker van rolt (en vastplakt) kan je die rechtop neerzetten. Of je maakt er een scherpe vouw in; kan je ook rechtop zetten. Waarom? Omdat het vel niet alleen nog maar een plat vlak is. Zo iets heeft de kaarthouder ook nodig. Als je er over nadenkt was het al een soort koker: een lus van alu strip. Maar die papieren koker kan je nog steeds plat samendrukken, dus in die richting is hij niet zo stijf. Voor de kaarthouder geldt: niet meer de strips alleen in een lus buigen, maar ook in een andere richting. Dwars er op. En dan krijg je zo iets als hier naast afgebeeld: een kaarthouder met een twist. De achterkant buigt makkelijk voorwaarts, maar is zijwaarts stijf, en de voorkant is getordeerd en buigt daardoor weer niet makkelijk voorwaarts. Samen is het een stuk steviger.
Het idee was duidelijk. Vervolgens ben ik deze twist gaan modelleren. Want voordat ik mijn kaarthouder ging omsmeden wilde ik wel zeker weten dat het ook echt veel ging helpen. Ik het was natuurlijk niet de bedoeling dat ik door de ene richting stijver te maken, een slapte in een andere zou creëren waardoor mijn kaart nog steeds, zij het in een andere richting, heen en weer zou zwiepen.
Het resultaat was verbluffend. Door simpelweg de strip te verdraaien ging de 1e resonantie-frequentie van 60 Hz naar 110 Hz. De oorspronkelijke laagste mode-shape, de voorwaartse trilling, ging zelfs omhoog naar 175 Hz. Dit was héél effectief.
Was dit het beste wat ik er van kon maken? Ik ben nog gaan kijken wat er zou gebeuren bij een andere twist-hoek. Alles van 0 tot 80 graden verdraaiing heeft Comsol voor me doorgerekend, en het optimum lag bij 70 graden. Bijna haaks dus, maar nét niet.
Dit was bovendien vrij makkelijk te realiseren in het echt. Ik schroefde de strips los, met een tweetal tangen pakte ik ze vast, net boven en onder de plek van de gewenste twist, en draaide eenvoudig een wokkel in de strips. Ik boorde een gaatje in het kokertje onderaan de houder, die het geheel aan mijn stuur vasthield, en klaar was ik.
Versie 3.0. Trilt praktisch niet meer.Hier is de twist van de voorste strips goed te zien.
Een praktijktest heeft laten zien dat inderdaad de trilling nagenoeg verdwenen is. Met de frequentie die omhoog gaat, gaat meestal de amplitude van de trilling omlaag, als de trillingsenergie gelijk blijft. Maar het gaat mij niet om de energie, maar om hoeveel je er van ziet als je kaart probeert te lezen. Prima dus.
Maar nu dient zich de volgende verbetering aan: hoe haal ik makkelijk mijn kaartplank met één hand van de houder af als de fiets overdwars op een kano geladen moet worden bijvoorbeeld; zodat hij niet door het water schept. Maar daarover vertel ik jullie een volgende keer.
Start reading, and let yourself be carried away with this thrilling adventure which begun on the way back from the Midwinter Run 2018 somewhere on the motorway A50 and ended on a podium in the German town of Thale at the end of the hARz Adventure Race 2018. Whoops, now I’ve spoiled the plot. Just pretend you missed that; since, at that moment of this story, I didn’t have the faintest idea either that it would end that well.
Sleep drunk? No way, merely saturated with adrenaline I guess, because I didn’t really sleep. Slowly, my eyesight recovers when I am no longer staring straight into 179 night-piercing headlights around me in the starting pen, but I only see back sides of people, running up the slope of the hill. The sky is still pitch-dark at the start, and that’s why everyone starts with a sort of white electric sun on his forehead. The first lap is a vertical one, stretches about 6 km, and begins with a mass start at 4:00 AM on a Saturday morning, in the former East German town of Thale, which is still in deep sleep. It lies in the northern lowland of the Harz, but is almost swallowed by the steep ridges of the mountains, which shoot up immediateley behind the park where the start takes place.
It is always a wonderful sight, such a swarm of lights piercing the dark, dancing over a single-track which connects the numerous hairpin curves, like beads on a string. There’s no need to read the map because there’s only one way up, and if you are going for a 32-hours race, you don’t need to be in front of the rest at the start; better to distribute your energy evenly over the 240 km that have yet to come. Well, the first one we’ve had by now. But where we intended to turn right, the human caterpillar keeps the left track. We think for about ¼ of a second… and then follow the crowd. So does everyone behind us, by the way. Well, what difference does it make? Start-1-2-3-4-start, or start-4-3-2-1-start is almost the same. Not running alone has its advantages too. A moment later, we find the the first checkpoint, CP number 4.
No looking for blue labels like at the Midwinterrun, here at The hARz, but chipping with an SI, a SportIdent race-bib. That’s nice and easy, as we do not have to write down anything. On to the next point. Like ants swarming onto a pile of food, 180 Adventure Racers try to make their way to the summit. CP 1 is at the top, and along the way up there are CP 3 and CP 2.
Adventure Race
What the hell is an ‘Adventure Race’ you probably wonder? An AR is a competition which mainly consists of mountain biking and running, and possibly some canoeing, or stepping, archery, or other disciplines. The maximum time is fixed, and in most cases that’s quite long. It might be 8 hours, but also 24, 72, or 32 hours like in the case of The hARz 2018. The more CP’s you find before closing time, the higher your score. Some points are mandatory, others are optional. “Finding” is a big word, it’s not about searching, but about the road between the points. And quite often, that’s missing. Or you have to determine that for yourself. And that is what it has in common with an orienteering run: map reading and deciding for the fastest route. And when you start running out of time, you also need to determine a strategy for which points you skip, to score still as much as possible. Meanwhile, there are more rules, but you will find out about them during the course of this story. Let’s get back to the race …
We deviate from our originally planned route, because everyone is going that way. If you only have 32 hours, you do not have that long to think. That’s what we should have done in advance. That is: at 10:30 PM the day before. Well, not really the day before, since -you remember- I hadn’t slept. When we received the maps at 10:30 PM, an A1-size sheet with on both sides routes, maps, assignments, and the roadbook , we immediately started Tomtomming; and so did all other teams. In an orienteering run you get the map the moment you start, also at the WOR or MWR, but in an AR you get it just a bit earlier.
roadbook (klik voor een grotere afbeelding)
So you can already get stressed pretty much before the start. And when it comes to 240 km of routes, it’s no problem to be busy with a marker and a ruler to determine the shortest routes until 2:00 AM, when normal people sleep, and the local night-nozems on their mopeds, who were initially driving circles around our campers on the parking lot behind the abandoned steel mill of Thale, like they have been doing for the past 50 years, have gone to bed for a long time, or at least have run out of their two-stroke-fuel-with-mixing-lubrication. An then to borrow a roll of boeklon (adhesive foil for covering paper) from the camper next to us, the one of WoDi and WoUt, to seal our map. As if it would rain. Still, sleeping from 2:00 to 3:30 PM would have been quite nice. But the subcutaneous tension defeats the sleep.
Thinking… I don’t know what I’m doing here. I could just bail out. This is not obligatory. The countdown to this unfathomable adventure, which will last infinitely, which’ length is beyond comprehension, which will undoubtedly lead to all kinds of aches and injuries, this countdown has already started, but the launch can still be called off. Just like that. However, luckily I’m too much of a coward to stop now. Calmly I let this train close in on me. Instead of sheep, I count CPs. And ponder without worrying. Double espresso will not be needed to get up, as, when I open my eyes, I hear how the alarmclock begins to beep. Shoving some oatmeal in, filling water bottles, provisions and everything else, and off we go to the start.
That’s the dream that is no dream, that’s what goes through my mind once we passed CP1 on the top of the hill, just behind a sort of castle, some 230 meters above the start. After the other 3 CPs it is now time to descend back to the bikes that we left at the start, and thus begin with stage 2. Headlights on, on our bikes, and while we cross the town -not to return there for the next 31 hours- we take a sip from the bottle with sports drink. Because now it will go fast. The next 56 km of stage 2 will bring along 1500 meters of altitude meters. And up it goes! Steep! Lowest gear. No lower gear than that … until suddenly, the chain jumps off the wrong side of the largest blade. I come to a sudden standstill with a lot of grinding and cracking noises. We put back on the chain. Greasy hands are not an issue, but an unreliable derailleur all the more. Bad luck for me! That bastard makes noises that were not there before. And we are just on our way … only 230 km to go. Or is this already the point of return? Is that what I do secretly hope? Leaving the race via a back door, blaming the material and odds? What am I doing here? Thoughts…
How it all started
January this year, after winning the Midwinter run, Patrick gave me a lift back home to Eindhoven. And, while I was still enjoying that win, when he asked “What about a 32-hour race?” I thought “Why not?”. And, even worse, I thought that out loud. Exactly the right timing, my friend. No way back for me; but it was still 3 months away, so there was plenty of time for training, I thought. While I am good at sleeping too little, 32 hours of being awake would not be the issue.
I did some running like I always do, checked the tires of my MTB once, and did not think too much about this awful plan. But, as April 21st got closer, my changing thoughts about it followed each other in an exponential pace. It started with:
Does a full weekend away from home for this race fit into my agenda?
Could I stay awake and keep moving around for so long?
Is this fun to do anyway?
If you are going to do something that you do not have the slightest idea about what it exactly implies, you can easily worry about not too relevant things. And because you probably realise that yourself, it even helps to relax. But that changes when you put a thermometer in there: three weeks ago Patrick and I would go cycling together. As a training. And we would go running through the Peel area. We would start at 4:00 AM to make it quite well resemble The hARz Adventure Race; at least, the start of it. I had not cycled all winter (okay, to work, and back), and returned home with quite some saddle pain. The list of ‘issues’ had changed spontaneously.
How can I avoid having to stand on my pedals after 100 km because I can not sit on my saddle anymore?
What on earth do I have to take with me to keep going for 32 hours, when after six hours on two snickers, a white chocolate bar, a muesli bar and a bag of wine gums I am starving?
Will I really do this in 3 weeks from now? By the way, where is the Harz actually?
You see, the worries are becoming more relevant. Staying awake does not seem to be a relevant issue anymore. And whether it’s fun? That’s also no longer a question now; we’ll just do it. But how? Maybe a soft cushion on my saddle might help a bit. And a pile of energy-rich food. Here on the left you see my stock for the first half of the race. And the formidable super-energy cake baked by Annelot herself (because that was baked fresh the evening before we left for the race) is even missing on the picture. 250 kCal of consumable energy per hour? Seems to me like a good rule-of-thumb. A snickers or half a chocolate bar is then just enough. But a standard granola bar does not suffice. We will see. Let’s pack some extra stuff.
But, hey, let’s get back to the slope where we are now no longer standing still, while the other participants pass by. Because I am not really a good cyclist. However, I gracefully reject the towing rope that Patrick has on the back of his bike to pull me uphill; that’s below my pride. So I pedal what I can. Up, endless up. Only by the time we have to switch once more back to the lowest gear (this time very cautiously, because I do not want to risk jamming the whole transmission) I realise that we have had a nice descend in between .
Endless is relative after all
With all that mesmerizing and worrying about how I ended up in this incredible adventure, it turns out that time flies. “Endless” is just relative after all.
A path to the left, which a few hours ago (I will not say ‘last night’ because the night hasn’t ended yet) we wanted to take (looking at only the map), seems to be closed by vegetation, and so we go right, together with a few other teams. Steep down, nice rush, easy. When I step off my bike to remove a branch from my rear wheel, I suddenly smell something burning. The disc of my rear brake squealed a half circle in the flesh of my calf, because I had clamped the rear wheel between my legs to hold my bike while pulling out that branch. Of course! The energy with which I have just overcome the last hill, has flown back into that steel disc on my rear axle. And this warmth is more than enough to decompose the hair on my calves into something smelly. Do I hear someone laughing at me? I’m really not an experienced cyclist, apparently … But look at the bright side now: it’s getting light.
Light
I did a test back home. My headlight, a Chinese Cree XML-T6 from dx.com, managed to keep shining for 3 hours at its maximum brightness. I think, however, that one night is a bit longer than that. Just counting the time, and I get at 12 hours darkness during the race. So I ordered an extra batterypack. Again from China. Not so smart. It did not arrive on time in Eindhoven. Via Tinytronics.nl I buy 6 lithium cells, those huge 18650 ones (true 3400 mAh from Panasonic, instead of Trust-, Ultra-, or Fandyfire rip-off’s that say “3500 mAh”, but that don’t live up to that , not even half of it). And that worked: now I got 9 hours of light. A lot of light. I put a freezer box around it, added a voltmeter to it so I know how much power there’s left, put some cables on it, and it’s ready.
But finished it’s only the Friday morning before the race, so until then it’s a pretty high uncertainty factor and stress item on my list.
Do I have enough light, and do I have it in time?
Can I survive the home-build map holder when I accidentally make a head-first roll over my handle bar?
How does my back survive my backpack?
Ad 2: I had -DIY-king that I am- hacked something nice: a sturdy swiveling map holder out of aluminum pipe in front of my handle bar that would not vibrate when going downhill.
Version 1.0
But it would also give not-so-nice injuries and fractures if I would tip over my handle bar.
So I modified that quickly in a flexible crumple zone, made out of aluminum strip.
Version 2.0. With crumple zone.
(The design is not quite finished yet: there is still a flexing of around 60 Hz, so it does not read so well on bumpy paths.
But with some modal analysis and some damping, I will soon come up with an optimised version 3.0.)
And Ad 3: Wednesday night before the race I went to run a bit with a backpack full of food and water, which resulted in a lower back with some scraped open blisters. Bloody thing! If that happened after 5 km, what will be left of me after running a marathon distance with it? The bottom of the backpack appears to have a somewhat sharp, hard edge, exactly where I have two hard, sharp bones. Inventiveness required. Where the recipe of Monty Python’s Flying Circus mainly boils down to making absurd combinations of two essentially normal things, the symbiosis of an item on the list with mandatory equipment for the race and a hard edge of the backpack provides the solution: I sewed my long-sleeved thermo shirt with some basic stitches onto the breathable mesh of the backpack, as a soft perspiration-permeable cushion. Two at one blow (although Wiesbaden is the home of The Valiant Little Tailor who spoke that fierce statement according to a Mr. Grimm -or was it his brother?- and which was later exaggerated as something with seven flies, is not located in de Harz), that is what I achieved, because that was how this, although redundant, but nevertheless still obligatory, warm shirt, was now utilised: as a comfort zone .
The shoes will not be an issue. I put complete trust in my pair of blue Inov-8 Roclite 305’s. Terribly robust and comfortable. A lot of grip and with my feet nicely close to the ground. Water may flow in, but out again too.
And, as H hour approaches, you see that I am mostly concerned about my equipment. Because that is what I can (or could) control. And the race itself? It will be quite a challenge, but I tell myself that you can not really train for a 32-hour race of over 240 km. Other than being a little fit, having a good sleep the days before, and being in a relaxed mood. Then I will be fine. So -how ironic- I’m tinkering and packing and fiddling and hobbying till too late in the evenings, and therefore I have to finish some essential things only at the last moment. But, when everything is finally ready late Thursday night, I grab a beer and get an excellent night’s sleep. The last one … until Sunday night, as you will see.
“Getting in the race”
But enough dreaming for now, about light among other things. Because it is actually light now. The day is starting: it suddenly appears to be a normal race. All displaced thoughts have been replaced. My top-3 of issues is now:
Do my gears keep up?
Do we keep up for 29½ hours?
When can we start running again? Because I want to.
We stop at the next CP under a bridge, and by bending I align my derailleur pad (just learned that it how it’s called). I’m careful not to bend it too far, because then it breaks. But as a result, I no longer shift from 2nd to 12th gear (out of 11), but just from 1 to 11. As it should be. The last noises and ticking, Patrick resolves by tuning it a bit on the handle bar. That’s 1 worry less.
The second? If we cycle on a flat section and we have a chat with another team, it turns out that they think the same. That is normal, apparently. It is that long and that far, you should not think too much about it. Just let yourself fall through it, is how they undergo it. Strange enough, that sounds like a warm bath to me in one way or another. Just like before the race my thought that 240 km in 32 hours means less than 8 km/h (and I run faster than that, let alone cycling), seemed comforting. Unnoticed, I regained all self-confidence. That is what is called “getting in the race”.
And the third point? No idea, because I am not the navigator at this moment, while on the bike; Patrick taking care of that. So in terms of our route I feel like dark in broad daylight. I did not memorize the map that well yesterday. Sleep deprivation is not the best stimulus for your memory. Suffering, on the other hand, is, because I remember very well that when the end of this stage came closer, a climb of almost 300 meters height suddenly appeared, and a moment after another one of 100. Just before the climb, organizer Winfried was enjoying the view of the exhausted teams passing by, without any regrets. On our gums we trudge uphill, but then finally our bikes can be dropped down, our water reserve replenished, the sanitary facilities filled, and a tune whistled. Because we are at TA1, which means the first transition area (and there is Winfried again). The next stage is called a hike .
Hike (Sat, 9:15 AM)
Different muscles, new strength. On my bike, my legs felt like pudding, because stage 2 ended with a climb up to the highest tip of the ski area that appeared to be there, but when you walk, apparently you use different fibers that have not acidified yet.
Funny, that only the ‘t’ as in ‘traveling’ makes the difference between here and there.
We note that there are not many other teams running here, and also that there were only a few bikes around TA1. Would we be in the forefront despite of my chain problems? Actually, that does not really matter now; there can happen a lot, and let’s first make sure we get up to halfway the race.
How do we get from TA1 to the obligatory part of this route ?
Did we bring enough water and food for 6 hours hiking?
Should we walk or run this hike?
Looking at this top-3, things are going quite well. Those are not worries, those are solvable issues. So we whistle a tune. ♫ Along the trail we march and sing, ♬ march and sing, ♪ march and sing ♫ and thus we hurtle down the slope, via the edge of a hill in order not to lose too much altitude that we will have to climb again, along the east of the town of Sankt Andreasberg. Issue # 1 has already been solved at the TA, when the organization told us that we are in this case allowed cross the yellow road, which separates the TA from the rest of the route. Normally this is not allowed for large ( yellow and orange) roads, unless a passable section is indicated by red brackets on the map.
This sometimes creates a puzzle out of planning the route. For example at the very last stage, but we’ll come to that later. We find a shortcut that results in fewer meters and altitude variation. Downhill and flat parts we run, uphill we walk. After the village, once in the beautiful nature reserve, the birds take over the whistling from us. It feels like we have done quite a lot already (and indeed this is the case), but it is only half past nine in the morning. It’s as if we’re having a jet lag; the watch-time differs from our perception. We overtake another team, “Wissenschaft Quedlinburg” I resolve afterwards, finished in 3rd place last year. But with their walking poles they overtake us later on when going uphill. And we change places repeatedly. Because the path is blocked by trees, we deviate somewhat from the track at some point, eventually loosing it, and a bit further than we expected we get back on the meandering forest road. And so we pass by CP10 without noticing it, just like the German team with whom we happily chat during this hike. Only 500 meters later we realise our mistake, turn around, find the CP, in an obvious place next to an unoverlookable bench; but by then three other teams have passed us. It appears to be less lonely than we thought. Wissenschaft turns around a bit later, and then their position is behind us again. The landscape is now phenomenal: a kind of high peat with pine trees, draped over hills. The clear blue sky slowly fills with veil clouds, which pleasantly dim the blistering sun. Then we arrive at a reservoir lake. Delicious cold water. (We spot Winfried again in the distance; I thought I only had a GPS logger in my backpack, but it seems like he can track us in some way.)
It looks like a scene from the Hobbit. Something with a ring of 240 km …
The landscape around the lake looks apocalyptic: bare light gray skeletons of dead pine trees border the banks. We wonder what has happened here, while eating a snickers. Later on, we walk again along a straight canal, like in the beginning of this route: the Rehberger Graben . Water from the hills is led to the lake, and via similar channels again along a number of water mills, where it used to be used as an energy source from the 17th century onward. An additional advantage of this cultural-historical artifact is that it runs particularly level. Tempo +1. Still, the pace has dropped a bit. Overwhelmed by the heat, despite applying sunscreen, and dehydrated? Would there be a restaurant there? We dream about an ice cold cola. But the building turns out to be closed and abandoned. How disappointing! But we will continue. More teams pop up here, some going in the opposite direction. Would it matter much? With three teams we head the same way, changing positions all the time. And along the way we talk about their previous adventure race experiences (which I do not have, but Patrick does). At a CP just before Sankt Andreasberg, when we are almost back at the start, there is some doubt about the correctness of the map. Another CP leads us down into a deep valley below the village. Where we then have to climb out again of course. The shape of the terrain forces us to make a considerable climb and inevitable descend. We do our best to keep a leveled track, but the last climb back up the ski slope cannot be avoided. We need some recovering when we are back in TA1, at our bikes. With – finally – the deserved cold Coke.
Rolling (Sat, 2:50 PM)
A kind of tranquility has come over us; something like “this is going well”. Which is very true when we roll down the ski hump. We float down over a kind of grass-piste, at a nice pace, quite easily. Yes, we know that after descending one has to climb. But surprisingly, climbing goes with the same ease as when we had just started. Unexpected fresh legs. I am still amazed at how well The Human Body appears to be able to recover from physical strain. The muscles for walking appeared to be undisturbed after cycling, but the bruised muscles for biking had almost completely restored after walking. I do think that the tight regime of hourly energy-bars and continuous drinking do help. But the body also clearly understands what is expected of it and cooperates loyally. Cool. The top-3 of that moment is:
It is getting warmer and warmer. Are we drinking enough?
We are ahead of our schedule. Does that mean that additionally we have to do the bonus stage at the end? That is quite some extra distance.
Did we really choose the smartest route at stage 1, or would S-4-3-1-2-S have been shorter?
If you do not continue, there will be no end
But is this also what you, dear reader, think now? Or are you wondering if you’re not yet halfway through this story? Because occasionally it is a bit lengthy indeed. Well, I will tell you this: at this point, we are not yet halfway along the route, and not even halfway through time. It will take another five hours before we are halfway at all. In other words: the finish is still far, far away. And that’s exactly what I’m trying to convey here. So sympathize. And read on, because if you do not continue, there will be no end.
Canoeing holiday (Sat, 3:55 PM)
In the meantime we won’t win a race with commonplaces, so we continue cycling to TA2, along the water just south of the dam. We leave one of the bikes, strap the other one onto the canoe, and have our inventory checked by the organization. There is a mandatory list of attributes that we must bring, including a warm sweater (or a kind of soft pillow at the bottom of my backpack), a whistle ♫ and a break-light . We have it all, so we pass the test and are allowed to continue, so we start paddling over the lake with a light headwind. The coolness of the water feels good. It looks like a short vacation during this stage 5. Actually it is one! Who else will see all the most beautiful spots in the Harz area in only 32 hours? This is the Harz for Japanese, but without a camera. Flash.
Stage 5b is unannounced: carry canoe for 500 meters. And bring a bicycle too. And as quick as possible. But then the fun starts: from the one AR that I have ever done before, I found that the best part: the Run-Bike stage.
A bit of an explanation: with a team of 2 you go 1 route with 1 bike. Not a tandem, nor going together on the one bike; that’s not allowed. So one of the two is the leap, and has to walk. But it is leapfrog, because after a few hundred meters you suddenly find a familiar bike in the verge, you jump onto it, and pass your teammate while cycling, after which it’s your turn to throw the bike back into the verge. The challenge is not to lose each other out of sight at a junction, so continuous communication about the route is essential. I like it. We do over 15 km of his outdoor game just within 2 hours; the total climb is about 600 m. (So that’s 15+6=21 km with the 100m ↑ = 1km → rule) Sometimes cycling is no option, and Patrick – what a king! – carries the MTB up on his shoulders, or carries it over entire trees. The landscape around the lake is beautiful, and the lightning fast alternations of running and cycling keep us mentally razor-sharp.
Cycling again (Sat, 6:50 PM)
That changes quickly when we start biking again. The road uphill climbs monotonously from the lake, with almost 10% slope, along an almost 5 km long road to a top. What initially starts with having pleasant fresh legs and feeling quite awake, eventually becomes a state of half-sleep. All urgency disappears, partly under the influence of the rosy evening sun. And at the end of the climb, at the CP, with a view over the lake, we sit down on a bench for 120 seconds. Then suddenly some mental alarm goes off. We must continue! Twilight sets in, time to wake up again. We are no longer ahead of our schedule. The cards have apparently been shuffled again (and we have been playing a bit longer in the hills around the lake).
Would we still have enough time left for the final bonus stage?
It suddenly is getting colder; do we have enough clothes with us for a cold night? Fortunately, I still have a warm ‘cushion’ on my backpack.
If we go slower than expected, do we have enough light (as in: battery charge) for the orienteering stage, which I run on a different battery pack than the one on my bike?
It takes a while before I realise that the night will not last longer if it takes us longer. Contrary to ourselves, the sun turns it rounds without getting tired. And the later we start the orienteering stage, the less battery power we will need.
But it is getting dark quickly now. Almost as quickly as we roll down the slope, chilled by the wind that evaporates the moisture on our sweaty skin. Fantastic how an eagle flies just a bit in front of us, just above the road. What huge wings, we think about him; what huge speed, he thinks about us. The next CP we find at dusk, but the one after that it’s really dark. Although it is close to a road, at least on the map, it is actually 30 meters above, on a rock. But that does not appear to be true either: this is a CP with a large Woudropers aspect. We find a bearing and distance. Peering along the needle of our compass, an increasing loud buzz arises just in front of us, which seems to come from the direction of a few red and green lights. Which in turn approach us too: they are attached to a drone, which is filming us. Does each team get their personal video afterwards, or is the camera team coincidentally on our heels? No time to think about it, because we have to go to the designated point on the other side of the valley. The bearing seems not by the least correct, but the description of our target, “Bergmannsbaude”, leaves no doubt. This stage all CP’s are located “slightly” higher than the road. What a “fun” theme (haha). So we go climbing a few dozen meters of stairs here. Back at the bikes we realise that we had better towed them up there in the first place, because the obvious continuation of our path continues from the Baude. Uphill.
Later this stage, another higher-than-high mast will follow, towering 20 stairs above the treetops. From the top of the tower (of course the SI of this CP is not below, what would you think?), we we can see in the distance a pair of MTB headlights. That must be other teams. Who else cycles through the woods at 10:45 PM here? But they are far enough away not to make us feel rushed. Only the temperature makes us go fast, because despite a windjack, it is feeling quite cold now. The last kilometers to the start of the compass-orienteering stage pass quickly; they lead us downward, and thus we feel quite fit when we arrive at TA4.
The bag of provisions that we have handed over before the start, and that we can get here at TA4, either before or after stage 8, make us doubt for a moment what to do, because if we collect it now, we will have to carry everything while on foot during the next section. But since there is still enough food in our backpacks and on the bikes for 16 km running, we decide not to collect the bag now. Besides, at this TA there are hotdogs, cocktail nuts, crisps, peanuts, biscuits and bananas. So we stuff ourselves with an energy buffer, shoot an arrow in the bullseye of a target (special task; hitting the board saves 10 minutes of penalty), and we fill the water bags, take our compass and go. What could go wrong?
We should excel at this discipline, so that puts some extra mental pressure on us. Can we cope with this extra tension on our shoulders? Oh, oh, how exciting this is!
As time flies, the bonus stage is probably no longer in reach, but is the final orienteering stage still completely doable?
How cold will it get during this clear-sky night?
Bearings (Sun, 0:00 AM)
While planning the routes in advance last night, apparently we were less sharp than now, because we did not notice that, according to the roadbook, a number of CPs are located near high voltage pylons. And those are usually quite accurately placed 250 meters apart. Which would make locating the checkpoints a whistle of a dime, were it not for my sightings that seemed to be always 5° too far clockwise. We appear each time too far “to the right”. That’s not too bad in the open field, where you can still see the CPs from 50 meters away thanks to the generous reflectors attached, but on the way from CP34 to CP35 it turns out to be disastrous. Look at our GPS track on the map below. Initially, we head spot on, but because it becomes quite a jungle halfway, we start following a more passable firebreak, and we arrive too far north. We follow a stream, which is shown on map in the tiny circle, in southern direction, but we find no CP. Thinking that we were already too far, we head back to the previous known point, try again, but now deliberately head a bit too far to the north, so that we know for certain that we have to follow the stream to the south. And now we succeed, albeit with half an hour delay, to score the CP. Afterwards, it is clear that we were pretty close by at the first attempt. This is clearly a thing to improve. And I still thought that we would score above average here. Bummer.
For now: first CP37, then CP36. The black dashes on the map, a railroad, are a robust stop line, so we aim for that. There is a waiting booth next to the railroad. With a reflector and an SI station. It would not …? That must be the shelter / Schutz are from CP36. Would that assignment be that transparent? That seems quite unlikely. Why would they first send us to a rather difficult point in a circle on the map (CP36) where nothing recognizable could be seen, and then direct us via a winding path (the red dotted line) to a very recognizable point on the map? Moreover: if you walk back from CP37 you would look directly at the guardhouse and in the night you can not miss the reflector that’s hanging on it. Anyone who starts looking for CP36 first has bad luck and loses a lot of time; while those who first aim for CP37 win the lottery with two fingers up their nose.
And a lottery it is at CP37 too. The CP should be near “a fallen tree”. And there are more than enough of them there. With somewhat more luck than wisdom, we find the needle in the proverbial haystack, and can go back to the start, TA4. Fast like lightning. We run the whole stretch.
Supercookies
The TA is suddenly 10 times more crowded than when we were here 3½ hours ago. Food, and food, and more food. Pasta, sausages, nuts. Everything tastes equally good. Because we are almost at ¾ of the race, with only 8½ hours to go, an amount of food equal to the 1st half would be heavily overdone. And I mean literally heavy. We brought half our ration at the start of the 1st half, and handed in half of it for the 2nd half of the race. So a hand full of bars and sweets is left behind. I will never know how the muesli-choco bars of Albert Heijn taste, and the chocolate-orange bars of Decathlon also lose it against a pack of dry sausages and the unbeatable energy cake baked by my daughter herself.
Autopilot (Sun, 3:35 AM)
More on autopilot than anything else we keep cycling towards the daylight. Occasionally sleepy, then awake again. Mainly because of the hours and hours without sleep and the endlessness. Lumbermen are no longer men with a red checkered blouse and an ax over their shoulder. No, not even with a chainsaw and a beard and a foolish hat. They sit on heavy machines that pick the trees from the ground and cut them in lumber on the spot. At least, that’s what I suspect.
Continuing is simply a matter of not stopping.
What I do know for sure is that they leave knee-deep tire tracks with a fist-deep profile of ridges that shake you through and through if you try to ride over them with your MTB, while you unsuccessfully try to keep the speed high and not to swear. The latter can not be avoided when somewhat later the map does out to be incorrect at some point. But can the map help it if someone has cut some extra roads out of this timber plantation? I would do so too, given the extortionate prices for wood at the hardware store. Money doesn’t grow here from the trees, it is the trees!
But anyway, this gives us the chance to make up for the errors with the compass bearings, and to show off our orienteering skills, because soon we regain our route and hit the next CP, because we quickly deduce where we are, based on the contour lines on the map. What is it we do not know now?
Did we make the right choice with the CP at the station? Or was it fake? It seemed just too easy. On the other hand, this is not a WOR.
How will the temperature develop As long as we keep moving, is it okay, or do I have to detach my thermo shirt from my backpack and wear it?
Do we keep the Sandman from our back, or will sleep overwhelm us, like it did with so many teams at TA4, who were napping against each other under their emergency blankets?
The sun is rising for the second time today. That is quite a confusing experience. Our feeling for time has completely dissolved. The recollection of the hours on this last bike stage are now more like a sort of time-lapse video in my memory. Some brief flashes of notable moments with noting in between.
Eating, till the cow comes home
Chronology is missing. We eat until the cow comes home, and drink the bottles empty. Endlessly many trees are the witnesses. I flip over when my front wheel gets stuck suddenly in the weak clay of a dam in a ditch. The wrinkle zone of my map holder on my handle bar works perfectly: the map is now in a totally bent position, but I myself do not have a scratch. We continue as if unperturbed. We make a turn at every intersection. No valley that isn’t followed by a hill. But suddenly, there is a village again. Friedrichsbrunn seems abandoned. Who would be here at a quarter past six in the morning?
Morning-O (Sun, 6:15 AM)
The answer is obvious when we report to TA5. There haven’t been many teams here yet. I guess there are twenty bikes, at most. The first team has been out on the next stage for 5 hours now, and they haven’t reported back yet, we hear from the organisation. If we take too long, it will be tight to arrive at the finish in time, let alone to do some of the bonus stage. 12:00, at noon, is the deadline. We estimate that we needed 45 minutes for the road back to Thale, to the finish in the Bergtheater. So we have exactly 5 hours left for 30 km of orienteering. I joke: that’s like a complete Woudlopers Orientation Run. But then in less time, with more elevation.
We do this on a shoestring. Carefully planned routes avoid unnecessary elevations. Walking an extra kilometer is equivalent to climbing 100 meters. Descending usually goes without penatly, if not too steep; than it may even give a speed gain. But something tells me that we do not walk on the Infinite Stairs of MC Escher, and you’ll net descend as much as you’ll climb when you end where you started: at our bikes. So there is no other option than to maintain altitude where possible. The fastest line between two points is in any case a straight line in terms of height profiles. Almost. We are doing well, points succeed each other quickly. We do not make a single mistake. And yet…
Do we have enough time? We had already decided that 4 of the CPs of this stage do cost a lot of vertical distance. But it makes no sense to leave regular CPs in favor of bonus CPs. For the final score at least. But if the teams ahead of us needed at least 5 hours…?
That bonus stage, there is no need to do it, if we do not even check all regular CPs. And it is not reachable anymore, given the time left. So after this stage, there is only 8 km of cycling, not 56. That’s a comforting prospect.
Is 30 km running anyway not a bit too much at this stage of the race?
Because it’s me now who is doing the map reading, I remember many more details than from the bike stage. But, my dear readers, let me spare you the details. Want to hear how the caffeine gel tasted? Or the muesli-lemon bar? That there was a pebble in my shoe? That after 2 minutes we took off the windbreakers, because it suddenly became a lot warmer? That we had not met anyone since the start of this stage? That one of us at a given moment was literally sleepwalking? But that after an almost vertical descent to cross a valley with a creek that was quickly over? No, I guess you do not want to hear all of that. I’ll reel forward just as fast until it becomes exciting again.
»FFWD (Sun, 8:45 AM)
This is the time when I normally ride my bike to work, and when the better ideas of the day arise. Or rather, the subconsciously matured ideas of the night submerge to the surface of consciousness. So they do now . We start counting: 2:30 hours to go, each CP we reached in roughly 30 minutes, and we still have 3 CPs to go, and then the track back to the TA. That leaves some space for more points. If we can still make it to one of those points that we skipped in the first place because they would cost excessive altimeters, that might just fit. Provided we increase our pace a bit. But if it does not work, then we may arrive at the finish too late. Every 10 minutes after 12:00, starting at 12:01, will cost us one CP. So if we do not make it, this extra effort is wasted, and even worse, if we will only arrive at 12:11, the penalty is again larger. It’s a gamble. But it is a sensible estimate. And an exciting one! Nothing ventured, nothing gained. We decide to postpone the decision until CP50: there we’ll decide whether we first go along CP48, or directly via CP49 and CP51 to the TA.
Cool! Suddenly all sleepiness has evaporated. Suddenly no caffeine is needed. All of a sudden, a heap of energy has emerged. We are even running uphill now, crossing right through the green forest until CP50, and there we only need a few seconds to finally decide: We go for it!
While running, we sped to the north. Suddenly there are other teams there too. They come from all directions. But we ignore them. We have our own plan. I do not mention the observation that the path runs down a river. Descending means climbing too. I know that Patrick is a little less backing the decision to go for CP48 than I do. And I tell myself that we will be at the top at CP48 within half an hour. Descending and climbing more meters was not part of the plan. We go all the way, to get there quickly, and indeed, after 25 minutes the CP is checked. We hit CP49 within schedule too. But CP51 is on a summit. So one last climb, now with some other teams surrounding us. With all soured muscles it is almost impossible to scramble over the immense boulders around the top, looking for the SI unit at this CP. This is without doubt the best hidden point of the entire race. But Patrick spots it, and then it’s done. This already feels like finishing, and we still have an hour and a half left.
Yet we do not want to waste time. The interesting thing about those races is that you have no idea who your competition is at that moment, and what their position is. All those other teams that swarm around here may have checked more or fewer points. The only influence you have is to go as fast as possible yourself. And no matter how tough it seems after more than 30 hours of non-stop sporting, it is a relatively simple task. Simple is good. Nothing hurts now.
Final sprint (Sun, 10:45 AM)
Back at the TA, we quickly jump on the bikes. We head in a different direction than the other teams. We think we have found a smarter route that leads only downhill. Let them cycle the shortcut, uphill. We speed downwards. Ehhh … why does our track suddenly go up? That was not the plan!
Turns out that reading elevation lines is sometimes a bit too farfetched after 31 intense hours. Pushing the bike by hand, we conquer the last slope. Horizontal at last. But not much later we go down again: what a speed! A last hill to the Hexentanzplatz, and roaring with effort, we climb the last obstacle. But what does it matter, we are there! We drop our bike, run into the arena shaped theater, and check our SI for the last time.
Muscle pain comes later, as we can still walk down the stairs, to the podium in depth. There is organizer Winfried again, to hand us a medal. We did it! Unimaginable. (Sunday morning 11:17)
Then everything starts to hurt. All muscles simultaneously. Especially when picking up the bike, bending over to loosen shoelaces, or getting up from a bench. But that’s an hour later, when our thirst is quenched with ein großes Weißbier, and a Pommes with maybe ein bisschen zu viel Mayo. Well, we deserved it. And there is room again for those thoughts, that thinking that never stops:
Could we have scored even more points in those last 45 minutes that were left?
Did we or did we not choose the best route for that last descent?
Was this it? It will not be true that I ever want to do this again, I hope? Aiaiai …
Thinking about everything, feeling satisfied, and proud, about could beer, that you recover on your way, that we had no major problems, no injuries, a lot of sport drinks, endless energy bars , whether there was a false CP at that station, the whole shebang mixed together. The last thought I remember is that the sun is burning in my face, and then I realise that we are now with the camper at the base where the prize ceremony will take place, in the sun, and that we have slept for 2 hours. Slept! The first time since Friday morning! But time to get up, as there will be food in fifteen minutes. Lots. I do not get enough of it, permanently feeling hungry this event. Eagerly everyone else is filling their plates too, especially with meat. And then it’s time for the prize ceremony.
The surprise of the race
Winfried is not a man of few words when there’s a lot of audience, But indeed, one can not end a 32-hour race within half a minute, with a quick prize-giving. Once it’s time for the Pro-2, our category, a shock strikes me when “31 hours 17” is called. Didn’t we return at 11:17? That can not be true. But it is! Like stung by a bee we jump up (where that strength suddenly comes from?) and walk to the podium. A bronze medal, who would have guessed that? I enjoy it with disbelief. We finished directly behind the other Dutch Adventure team. We still owe them a roll boeklon. It was worth it!
I would love to be drinking beers in the sun for hours, to celebrate it. But the very last section is a tough one, perhaps the toughest of all: driving back home for another six hours. Let’s hope that Patrick does not ask me for joining on a 72-hour race, because this is not the moment that I can decline anything…
Epilogue
Will I do this again? Definitely. Next week? No! It is impairing. At a short orienteering race, the Wednesday after my legs give up sooner than normal. During the first days of the week after, I’m not in the mood for writing this story. But at the same time: the thought that we have accomplished this, that we can perform top-sport for 32 hours, that the body has a gigantic resilience, those things give a tremendous confidence, and thinking of our unimaginable result gives tremendous energy. This unique experience is definitely more than worth the effort.
I can not resist analyzing stage 1. And guess what? Our sequence of points was no longer than the alternative, so there was nothing wrong with that afterwards.
Try to determine the shortest route from the start along (1), (2), (3) and (4), and back to start.
And once the full result is published on the site of The hARz you can also expect an analysis of the results, teams, CPs , and stages. But at the moment I think I have written enough. That should of course not take longer than the race itself …
Do you want to stay informed of updates? Then leave your email address here on the right side, and you will receive an email if I write something new.
Op 2 november 2012 wist ik niet dat ik bijna vier jaar laten weer door dat zelfde bos zou rennen als waar ik toen een tiental geocaches (multi’s, mysteries, traditionals) zocht met de Altijd Snelle Mystery Loggers. En ook op 31 juli 2016 duurde het tot bijna de finish tot ik door had waar ik was. Althans, dat dit het zelfde bos was, en dat de start van vandaag de lunch-locatie van weleer was. Ineens viel het kwartje van de uitzichttoren. Want, in tegenstelling tot menige oriëntatieloop de laatste tijd, wist ik deze keer nagenoeg voortdurend waar ik uithing. Met andere woorden: het ging weer goed!
Omdat oriënteren voor een groot deel tussen je oren plaats vindt, en ik nogal de neiging heb tot reflecteren, gaat het soms met ups en downs. Loop ik een paar keer goed, dan vier ik de teugels wat wat techniek betreft, om de volgende keren te constateren dat ik maar beter beter stappen kan tellen, regelmatiger kompas kan gebruiken, en nauwkeuriger kaartcontact kan houden. Om vervolgens te constateren dat ik wat harder door moet lopen en minder moet treuzelen met magneetnaalden, gevouwen kaarten, en getelde passen. Nu zit ik in de fase van het betere stappen tellen, en moet ik de volgende keer dus wat beter op de naald lopen en koers houden. Zo gaat dat. Lees maar verder.
Bandit
Maar voordat je verder leest kan je ook alvast een nieuw window openen en YouTube aanslingeren, want ik heb weer eens een filmpje gemaakt. Dit keer met een geleende TomTom Bandit 4LB00, om te kijken hoe geschikt die is voor Orienteering Headcam Video’s. Hij werkt uitstekend, minstens zo goed als mijn Contour Roam, maar daarover later meer.
Wedstrijd
Het leuke van vroeg starten is dat je niet door het platgetrapte spoort in het gras van lopers vóór je rent. Maar rond post 2 was er geen gras, en in eerste instantie ook geen post. Ik zag hem niet, al zie je op de kaart hier onder dat ik er vlak langs liep.
Ik denk zelfs dat je hem op 3:40 in het filmpje al gewoon ziet staan, en ik zag hem zelf ook, maar in de veronderstelling dat ik er nog niet was (ik zocht naar een greppel die ik als aanvalspunt wilde gebruiken) besloot ik in de gauwigheid dat ik nog verder moest lopen. Vreemde beslissing, die me anderhalve minuut zou kosten. Maar ik herpakte de wedstrijd weer, en nam me voor voorlopig geen fouten meer te maken. En voor een keer kwam dat voornemen ook uit, waardoor er over de daaropvolgende posten, tot en met 9, eigenlijk niet zo veel smeuïgs te vertellen valt.
Hoewel het natuurlijk ook interessant is als alles wel volgens plan verloopt, zoals mijn route van 6 naar 7. Ik koos er voor om aan de noordkant (rechts) van de moerassen te blijven, en gebruikte het pad als stoplijn. Om vandaar uit over de langgerekte heuvel te lopen, omdat die hoog, droog, en hard was vermoedelijk, en vanaf het uiteinde op het ook naar het westelijke punten van het achterste moeras te gaan, naar de post. En dat lukte perfect.
Deze moerassen had ik ‘overleefd’ maar onderweg naar 8 stonden sommige paden compleet blank. Een paar weken terug had ik verschrikkelijke blaren overgehouden aan een paar natte voeten, en ik hoopte dat dit keer te voorkomen. Maar ja…
De route van 9 naar 10 ging overigens niet zozeer fout, als wel was het een behoorlijk lastig been. De kortste route loopt ongetwijfeld dwars door het bos, maar een vergelijking met de route van Ralph (rood) en mijn route (blauw) over de paden, laat zien dat hoewel we overall toch ongeveer even hard liepen, doorsteken hier minuten extra kostte. Ik vond het ook lastig om in te schatten hoe het ‘witte’ bos er uit zou zien, omdat tegen de paden aan al het bos ondoorzichtig ‘groen’ was, en de doorloopbaarheid dus een onverantwoorde gok inhield.Maar het spectaculairst werd het vanaf het moment dat het pad in noordoostelijke richting naar 10 liep. Het begon nog redelijk, zij het dat het pad zo onherkenbaar was dat ik er in eerste instantie voorbij rende, maar al gauw stond ik tot mijn middel in het water. Vies bruin stilstaand water. Waardoorheen rennen niet meer mogelijk was, en waarbij door het opspattende water mijn kaart nat werd, zodat ik al gauw met de kaart boven mijn hoofd verder liep, balancerend om niet om te vallen en helemaal nat te worden. Ik bedacht dat het wel interessante beelden zou opleveren voor de video.
Intussen was het vrijwel onmogelijk om realistisch afstand in te schatten. Er was een hele flauwe bocht in het pad te zien, maar ik wilde doorlopen tot aan de ‘greppel’ die vanaf het pad naar de post zou moeten lopen. Alleen was die greppel net zo min te onderscheiden in het compleet onder water staande bos, als de beek die links van het pad zou hebben moeten lopen. Het hele bos was een beek of greppel, en ik had geen zin om op de tast te proberen waar ik nog een meter dieper zou wegzinken. Dus liep ik door tot waar het droger werd, besloot dat ik te ver was, heroriënteerde me, en liep pal op de post af. Alleen dan na 300 meter méér zwemmen dan via de kortste route.
Een paar posten verder had ik wat beter op mijn kompas moeten kijken. Want in plaats van door het dichte bos zo snel mogelijk naar het zuiden, naar het dichtstbijzijnde pad te lopen, week ik bijna een kwart slag af naar het westen en liep parallel aan het pad in plaats van er recht op af. Dat was natuurlijk wel een beetje jammer. Twee hele minuten ploeterde ik door ruig bos vol greppels overdwars. Om nog een beetje vaart te houden liep ik af en toe parallel aan de greppeltjes, maar daarin zat nou net de fout: ik werd hierdoor naar het westen getrokken, zonder dat ik me er bewust van was. En zo kwam ik uit op het oost-west pad, in de veronderstelling dat ik oostelijk van de splitsing liep en het voetpad kennelijk had gemist, terwijl ik in werkelijkheid een stuk naar het westen was, en waardoor ik nota bene nog veder doorrende in westelijke richting. Gelukkig had ik na 10 seconde mijn fout door en keerde alsnog om.
Een leuke routekeuze was die van 15 naar 16. Nadat ik bij 15 nog een dikke minuut had verloren door hem niet te vinden, besloot ik even flink door te lopen, en gebruik te maken van extra snelheid van de paden. Op zich had de rode route naar 16 dwars door het bos nog wel snel kunnen zijn, en er zaten ook wat stukken ‘wit’ bos tussen, maar mijn ervaringen vandaag met dit bos waren niet zo denderend, met name qua snelheid, dat het pad me beter leek. En dat bleek te kloppen, want de verloren tijd van 15 werd bij 16 bijna compleet goed gemaakt.
Wat daarna volgde was een uitstekende finale, met soms een beetje geluk. Vlak voor de finish lag nog een doolhof aan kleine paadjes, waarbij het veel tijd had kunnen kosten als ik verkeerd was gelopen. Maar door goed kaartcontact houden en een beroep op mijn richtingsgevoel (nee, geluk was er uiteraard niet bij!) verliep dit vlekkeloos, en mocht ik naar post 19 en de finish de snelste tijd van de dag noteren, volgens de splits.
Ik ben dik tevreden. Lekker gelopen, geen blaren, een paar goede routekeuzes, en als leermomentje voor de volgende keer: kompas gebruiken.
Video
Ik heb weer eens een video gemaakt vanuit mijn perspectief. Zoals ik er wel meer heb gepost op YouTube, met een Quickroute kaart via RGMapVideo er in gemonteerd, maar dit keer met een andere camera.
De TomTom Bandit is een leuke actioncamera van TomTom, die erg geschikt is voor Oriëntatielopen, omdat hij niet alleen in breedbeeld-, maar ook in normale beeldverhouding kan filmen, zodat je niet door een brievenbus naar de struiken kijkt, maar ook nog wat boven en onder ziet. Overigens kon mijn oude Contour Roam dat ook.
Hij valt op door zijn bedieningsgemak en veelzijdigheid. Hij heeft namelijk gescheiden start- en stop-knoppen, waardoor je blind de juiste actie kan uitvoeren, en niet per ongeluk stopt als je juist wilt starten. De knoppen zijn groot genoeg, maar worden niet per abuis ingedrukt door een passerende tak (zoals bij de Contour regelmatig gebeurde). Mooi is dat je hem met de smartphone kan instellen en een live-weergave kan gebruiken om hem recht te zetten (nou zat hij toch een beetje scheef op mijn hoofd; het zou mooi zijn als je de rotatie kon locken als hij eenmaal goed staat). Maar alle opname-formaat en -kwaliteits keuzes zijn ook via het kleine LCD scherm op de Bandit zelf te maken.
De batterij hield het lang genoeg uit. Dat was toen ik hem in de winter probeerde wel anders. Toen was hij na een half uur op. Ik denk vanwege de kou. Dat zou wel een verbeterpuntje kunnen zijn. Misschien lag dat aan dit exemplaar.
De Bandit’s beeld stabilisatie is best goed, en het centrum trilt niet, maar het laat een flinke steek vallen bij het corrigeren van rotaties, en laag-frequente bewegingen. Op zich niet verwonderlijk, want je moet dan voldoende grote marges hebben om stukken beeld weg te laten zodat wat overblijft geen zwarte randen heeft. Dat heeft mijn na-bewerkte resultaat dus wel (via de deshaker plugin van VirtualDub), omdat ik wat sterkere camera-bewegingen heb met de camera aan mijn hoofd, dan waarop de Bandit rekent. Door de loop-beweging kantelt het beeld ook behoorlijk van links naar rechts, en het lijkt of er in die richting geen stabilisatie door de Bandit wordt toegepast.
Als de Bandit meteen een stabiel beeld zou leveren zou dat heel veel werk en tijd schelen bij het maken van orienteering videos (en een hoop misselijkheid bij het bekijken).
Verder zat hij goed vast op mijn hoofd en schudde niet. Ik had een strakke, niet-elastische band om mijn hoofd, die ik een paar keer recht trok als hij wat omhoog wandelde en iets losser kwam te zitten, maar dit lijkt wel stabieler te werken dan een elastische band. Hij ik lekker klein, en zit aan de zijkant, waar hij minder tegen objecten aan stoot dan bijvoorbeeld een GoPro die bovenop zit en veel meer uitsteekt. En daardoor totaal ongeschikt is als action camera.
Jammer is wel dat de TomTom niet, als hij aan de zijkant zit, op en neer te richten is, met de meegeleverde klemmen. Alle houders zitten in een ‘vaste’ positie en kunnen niet roteren. Dat mis ik wel.
Het geluid is niet slecht. Ik kan mezelf redelijk goed verstaan tussen al het windgeruis en gehijg door, al zou het volume iets hoger mogen.
Wil deze camera echt heel makkelijk werken voor video’s met oriëntatiekaarten, dan zou de stabilisatie ook rotatie moeten aanpakken, en liefst ook grote laagfrequente bewegingen, en zou je via een (web?) interface eigen, ingescande kaarten moeten kunnen toevoegen (na kalibreren) en splits toevoegen (of laden van een website met uitslagen). De Bandit heeft immers al een ingebouwde GPS, kan met een hartslagband praten, en heeft een wifi-interface, dus de infrastructuur voor een complete verwerking is er al. Het wachten is op de software. Ik heb vernomen dat er misschien een aangepaste beeldstabilisatie aankomt.
I bought a new pair of shoes: the Inov-8 RocLite 285. For orienteering and for street-running. Not that the old ones were worn, but they didn’t fit all the terrains I use to cross.
Most orienteering races, I run my pair of Inov-8 Oroc 340’s (346.6 kilometers on the odometer, right now), that I bought April 1st 2012. But the steel spikes are not the best base on asphalt or other pavement.
On the other hand, the soft, flat, smooth sole of my marathon shoes, the Saucony Men ProGrid Triumph 8, are not the best option for off-road racing. So I needed something in between, suitable for paved roads, and anything else. With a lot of grip, but without feeling the individual studs when running on paved roads. With a low heel, but some damping; although I prefer little damping on the road for the direct feeling. A light shoe for long distances, but with some stability for my ankles.
Length web-browsing, review reading, running-mate consulting, and fitting, pointed in the direction of the Inov-8 RocLite series. Other options had been the TrailRoc 255 and the X-Talon 190. I tried them in the O-Crew “shop”, and decided that the size should be ½ bigger than my Oroc’s (although they were the same brand).
Next thing was to try them out in the field. The first meters on them ever became the first of 15000, during the Genneperparkenloop. The result was a pair of blisters, but hey, what do you expect if you try your new shoes on a fast 15k with sharp turns and some mud? The running itself went perfect, that day.
I was doubting whether to wear them during the Midwinterrun, and the Woudlopers Oriëntatierun. But I didn’t. Afraid to make the flashy red fabric dirty? No, I guess I just stuck to what I was used to, my good old Orocs. But last Friday, I ran the night orienteering run in Genk on them, to my complete satisfaction, and last Sunday, I ran, through the fresh snow, through the forests and over the hay around Leenderheide.
This last run was a good combination of paved and unpaved roads, fresh and compact snow, and loose sand and mud. On most terrain, the grip was perfect; only on hard, compacted, snow, I felt minimal sliding back, but no loss of control. I got the feeling there that the Orocs would have performed better there, but I did not compare them at that moment, under the same circumstances.
Furthermore, I noticed that the open structure of the upper shoe easily lets in water (melted snow), and I heard that the same would happen in dry sand. But I suppose my feet would have gotten wet anyway after running through 5 cm of fresh snow for 1.5 hours.
On the other hand, on the paved roads, back in the cite towards home, they behaved pretty well. The roads were wet, with slush-puppy substance on them, and the grip was excellent. The soles are a bit stiffer than my road-running shoes, but still comfortable enough to sustain for a longer period (and it is a good way to exercise the recoil in my calves).
So, my conclusion so far is that I made the right choice, to find a balance between on- and off-road shoes. And I guess that I will use them quite a lot for training, when I first have to conquer the asphalt, before I reach the wilderness. But for sprint-orienteering, they could be my favorite too. We’ll see. They’re a good excuse anyway to create some more elephant-trails…
Waarom werkte mijn kompas gisteren niet? Een mogelijke verklaring…
In de categorie kip-ei problemen, komt bij mij regelmatig de vraag naar boven of de Noordpool een noordpool is of een zuidpool.
Een magneet bestaat (vrijwel altijd) uit een noord- en een zuidpool. Knip je hem in tweeën, dan ontstaan er twee magneten met ieder op zijn beurt weer een noord- en een zuidpool. Een kompasnaald heeft ook een magneetje in zich (dikwijls er onder bevestigd). Dat magneetje heeft dus ook en zuid- en noordpool.
Mijn vraag is eigenlijk of de noord- of de zuidpool van dat magneetje naar de noordpool wijst.
Immers, tegengestelde polen trekken elkaar aan. Dus een magnetische noordpool trekt een magnetische zuidpool aan. Als de Noordpool een noordpool is wijst dus de zuidpool van de magneet in het kompas naar het noorden.
Wat zoekwerk leert: de magnetische noordpool van een magneet wijst naar het Noorden. Deze kant van de magneet in een kompas is dus in de richting van de N bevestigd, het dikwijls rode deel van de naald. De Noorpool is dus een magnetische zuidpool.
Geen wonder dat mijn kompas gisteren in de war was, want dat was voor mij ook wel even slikken.
De vraag blijft welke lolbroek in het Nederlands “zuidpool” met een Z heeft geschreven, terwijl zowel vanuit het Oosten als het Westen de Z een N is.
Dat is natuurlijk pijnlijk: zien dat je iets wel gezien hebt maar niet gekeken (als in: gehoord maar niet geluisterd). Het is me overkomen. Ik wist niet wat ik zag toen ik laatst mijn headcam video van 19 januari, op de kaart Pijnven noord, aan het bekijken was. Ik herinner me dat ik daar bij post 2 hopeloos lang heb lopen zoeken. Ik was niet verdwaald, ik wist precies waar ik was, maar ik zag de wit-oranje postzak niet. En dan ga je zoeken, want misschien staat hij verkeerd. Of zit ik er zelf net naast. Wel een minuut of 3:20 heb ik rondjes gelopen. Je kan het op de kaart goed zien: Quickroute. Ik kwam van uit het oosten aanlopen, sneed een stukje af, en zo te zien, vlak voordat ik bij de post was, draaide ik naar links. Om dan te gaan rondfladderen. En uiteindelijk, nadat vanuit de tegenovergestelde richting naar de post was gelopen, zag ik de vlag. Tot zo ver het acceptabele stuk van het verhaal.
Maar kijk nu eens naar het onderstaande fragment:
Ik loop op de post af, in mijn ooghoek is hij even zichtbaar, rechts in beeld, wanneer het filmpje even stop, en ik loop er stomweg voorbij! Wat een blunder! Een beetje Sven Kramer die op de Olympische Spelen van 2010 de verkeerde baan nam. Alleen dan zonder coach die ik de schuld kan geven.En weer was het de camera die het pijnlijk hard vastlegde.
Dus nu dient de vraag zich aan: film ik de volgende keer weer, of laat ik het hier bij? Nou ja, de rest maakt het toch wel de moeite waard om terug te kijken.
Pittig, zo’n berg. Dat ben ik niet gewend. Af en toe een zandhoop, dat ken ik wel, maar dit was andere koek. Maar daarom niet minder leuk!
Bovendien heb ik naar eigen zeggen en in alle bescheidenheid fantastisch gelopen. Slechts 1’35” achter de nummer vier, en daarmee 7e, en 12’57” achter de nummer 1. Da’s niet verkeerd, op een totaal van 66’58”. Maar ik heb dan ook geen noemenswaardige fouten gemaakt, behalve dat ik dacht dat over de top van de berg sneller was dan er omheen, onderweg van 15 naar 16.
Wel een hoop werk, zo’n orienteringsloop. Het begint natuurlijk bij de kalender, waar je een wedstrijd in de buurt uitzoekt, vervolgens een carpool-afspraak maken, kijken of er nog geocaches onderweg of in de buurt liggen, spullen pakken, GPS-en opladen, nieuwe schaalverdeling op mijn duimkompas plakken (1:10000 volgens de website, maar het was 1 april, dus bij de start bleek ik 1:7500 te moeten hebben; puntje jammer), route plannen, kijken of er omleidingen zijn (of niet), en vroeg opstaan. Vervolgens naar de start rijden, inschrijven, een euro op zak steken voor toegang tot het domein, postomschrijving meenemen, verkleden, hartslagband om doen, trui uittrekken (geniaal, Hans, anders was het veel te heet geweest), en camera op mijn hoofd zetten.
Klaar? Bijna. Eerst naar de start lopen, stukje warmdraaien, GPS-logger resetten, wachten tot de start vrij is, kaart pakken, camera starten, GPS starten, EMIT inleggen, en gaan.
Waarom is de start (het driehoekje op de kaart) altijd een eindje voorbij de eerste EMIT die de tijd registreert? En staat er op dat punt weer geen EMIT?
Waar heen? Dat staat op de kaart. Maar het is altijd even zoeken waar ik ben, en wat waar is. Telkens vraag ik me weer af waarom de start niet de start is, maar het een x-aantal meters lopen is naar het driehoekje op de kaart, terwijl daar geen EMIT-control staat. Gevoel voor de schaal krijgen is ook zo iets. En het terrein? Is het droog of zacht? Is zand mul of zijn paden in het voordeel? Woekert hier braam, brandnetel of prikkeldraad?
Veel meer hoef je tijdens de wedstrijd zelf niet te doen, behalve zo hard mogelijk gaan over de snelste route. En direct de posten vinden. En niet vallen, geen attributen verliezen, geen takken in je oog krijgen, geen fouten maken, goed risico’s inschatten, en genieten van de natuur die op volle snelheid aan je voorbijtrekt.
Tot je aan de finish komt. Even nog een eindsprint met Hans er uit persen, en dan uithijgen, GPS-horloge stoppen, camera uitzetten, teruglopen, EMIT uit laten lezen, uitslagen bekijken, biertje kopen, douchen en verkleden, nog een trappist, napraten, routes vergelijken, vrienden maken, leren. En passant een paar schoenen kopen bij A3, en een achteruitkijkspiegel-O-post-zak.
Thuis pak je je tas uit, gooit je spullen in de was, opent de Splitsbrowserpagina van het event, slaat de .csv file op voor later, copieert de regel met splits, leest je GPS uit met TraingCenter of GPSbabel, combineert met een Matlab scriptje de .tcx of .gpx file met de splits-regel zodat de tussentijden er in komen te staan, scant de kaart, combineert beide in Quickroute, calibreert de kaart, speelt wat met de instellingen, uploadt het resultaat naar je DOMA-server, laad de GPS-en op voor de volgende keer, sluit je camera aan, zet de .mov files op je PC, exporteert de route-gegevens uit Quickroute, past de RGMapVideo .ini files aan, synchroniseert de GPS- en film starttijden, start de conversie, en wacht 1 dag tot het resultaat af is. Intussen haal je die ene teek uit je lijf die mee is gelift, zet tijd, afstand, en hartslag op Attackpoint, en drinkt nog wat om de vochtbalans te herstellen. Maar daarna heb je ook wat:
En nog een dag later ben je er achter hoe je het filmpje, èn het geluid, op 4x de snelheid kan afspelen zodat het nog leuk te bekijken is.
Leermomenten
Ook vandaag heb ik weer het een en ander geleerd, ondanks dat, of misschien juist omdat, het behoorlijk goed ging.
Op hoogtelijnen letten: de punten waar ik veel tijd verloor waren dit keer niet bij het zoeken naar posten, maar op het gebruik van de hoogteverschillen onderweg. Beter op de kaart kijken kost tijd, maar verdient zich terug als ik had gezien dat van 16 naar 17 een pad weliswaar om leek, maar op dezelfde hoogte als de post uitkwam. Of op weg naar 16 had een ommetje om de top me hoogtemeters en steile flanken gescheeld. Om op de kaart, maar sneller in tijd. En op weg naar 15 had ik beter in het bos, maar op hoogte kunnen blijven, dan omhoog lopen naar het pad, en weer dalen naar de post. Of op weg van 5 naar 6 had de helling me direct naar de post kunnen leiden. Opletten dus! Maar goed, dit was mijn eerst loop met echt reliëf.
Niet laten afleiden door het moois in de natuur, maar focus op de route en het terrein.
Laat je opjutten door andere lopers, dat houdt de vaart er in. Maar alleen als je zeker weet dat je goed loopt.
Goed schoeisel kan helpen, zeker op heuvels als deze.
Conditie blijft belangrijk, vooral aan het eind, en bergop. Hoe train je dat in Eindhoven? Gebouw 8 op-en-neer?
Wat is mijn stijgsnelheid? Kan ik beter slalommen bergop (en af?!) of is de kortste route de snelste? Er zal wel een omslagpunt zijn (zo las ik ooit in the Scientific Journal of Orienteering).
Blijf vooruit lezen. Deed ik dit keer meestal wel, maar het moet gewoon routine worden.
Waarom staan de controls altijd andersom met hoe ik met mijn EMIT aan kom lopen? Anders vastpakken?
Prikkeldraad kan je overheen of onderdoor, als dat mag van de kaart. Dus niet te lang over nadenken, gewoon gaan.
Zorg dat als je een camera draagt, die goed zit en niet constant rammelt. Dat geeft zo’n onrustig beeld achteraf.
Een specifieke schaalverdeling op het kompas is leuk, maar dan moet de schaal wel kloppen. Een in-‘t-veld-verwisselbare-schaal zou idealer zijn. Maar mijn superlijm-op-duim-schaal op mijn andere hand bewees des te meer diensten.
Toch ben ik dik tevreden. Op naar de volgende O-loop!
Herken je dit? Je hebt een GPS track, van een tracklogger (in .gpx formaat) of van je Garmin horloge (in .tcx formaat), maar er zitten geen splits in, omdat je niet bij elke post op het knopje hebt gedrukt. En de club gebruikt niet Winsplits in combinatie met die ene specifieke server waar Quickroute mee praat, dus je kan de splits niet automatisch in Quickroute krijgen.
Herkenbaar? Je zult handmatig de tijden in moeten voeren, door op de juiste plaatsen op de kaart te klikken.
Of je schrijft een klein programmatje in Matlab (of gebruikt mijn code) om de .tcx files te voorzien van de splits die je eenvoudig van de Slitsbrowser pagina haalt (de regel in de Results Table met jouw naam er voor; copy – paste).
Heb je geen Garmin .tcx file, maar een generieke .gpx file van een tracklogger, maak er dan eerst een .tcx file van met GPSbabel. gpsbabel -t -i gpx -f dit_track_bestand.gpx -o gtrnctr,course=0 -F het_nieuwe_bestand.tcx
En zo heb ik bijvoorbeeld deze kaart van Hamont gemaakt, met de controls direct op de juiste plek.
Er zit een slimmigheidje in de functie om te detecteren hoeveel tijdverschil er tussen de GPS gegevens zit en de start. Mocht dat niet werken, knip dan handmatig tevoren het stuk van de track tot vlak voor de start, en vlak na de finish af.
Mochten ze in QuickRoute het inladen van SplitsBrowser files ondersteuen, dan zal het wel op het QuickRoute Forum te lezen zijn. En dat is wellicht ook de plaats om om deze feature te vragen. Hoe meer mensen het hier over hebben, hoe groter de kans.
function splits2tcx(in_file,splits)% om een extra neutralisatie-post in mee te nemen die niet in de splits zat, voeg een% +0:17 (of andere tijd) toe op de plaats. % gpsbabel = 'c:\localdata\bin\gpsbabel\gpsbabel.exe'% CHECK various splits strings
force_tcx_conversion = 1; % force gpsbabel to convert tcx to tcx (to fix for example Android Garmin Uploader files)ifnargin support for%s files not yet implemented.\n',fe);endif nok
error('err-> conversion to .tcx file failed');
elsefprintf('done.\n'); % JHHendendfprintf('** acquiring splits **\n');
if nargin0)% absolute timesif splits(1)~=splits(end)warning('I expected the total time (1st data point) to be equal to the finish time (last data point). Netralized leg compensation?');
end
splittimes = [0 splits(2:end)];
else% relative times
splittimes = [0cumsum(splits)];
endfprintf('** using split times: "%s" **\n',reshape(strvcat(m2ms(splittimes'/60,1)',' '),1,[]));
fprintf('** reading tcx file: "%s" **\n',tcx_file);
t = []; tp = [];
d = []; dp = [];
ll = []; lp = [];
[fid,err] = fopen(tcx_file,'r');
if fid failed opening file "%s" for reading, with error: %s',tcx_file,err);end
arm = 0;
while ~feof(fid)
l = fgetl(fid);
hms = sscanf(l,'%*[^<]<time>%*[^T]T%d:%d:%dZ</time>');
if ~isempty(hms)
t(max(length(d),size(ll,1))+1) = [60*60601]*hms;
tp(max(length(d),size(ll,1))+1) = ftell(fid);
arm = 1;
else
dm = sscanf(l,'%*[^<]%f');
if arm && ~isempty(dm)
d(length(t)) = dm;
dp(length(t)) = ftell(fid);
iflength(d)>length(t)
l
elseiflength(d)<length(t)
l
end
arm = 0;
else
la = sscanf(l,'%*[^<]%f');
if arm && ~isempty(la)
ll(length(t),1) = la;
lp(length(t)) = ftell(fid);
else
lo = sscanf(l,'%*[^<]%f');
if arm && ~isempty(lo)
ll(length(t),2) = lo;
elsels = sscanf(l,'%*[^<]');
if ~isempty(ls)
arm = 0;
endendendendendendif arm % last timepoint has no location or distanceif ~isempty(d)
t = t(1:length(d));
elseif ~isempty(ll)
t = t(1:size(ll,1));
endend
findmin = inline('min(find(a(:)==min(a(:))))','a');
if ~isempty(d)fprintf('%d timestamps; %d distances; %d splits; %d gaps\n',length(t),length(d),length(find(diff(t)==0)),length(find(diff(t)>1)));
elsefprintf('%d timestamps; %d distances; %d splits; %d gaps\n',length(t),length(ll),length(find(diff(t)==0)),length(find(diff(t)>1)));
end
lapsplit = find(diff(t)==0);
t(lapsplit) = [];
ll(lapsplit,:) = [];
if ~isempty(d)
d(lapsplit) = [];
dd = diff(d);
else[x,y] = deg2utm(ll(:,1),ll(:,2));
dd = sqrt(sum(diff([x y]).^2,2));
end
dd = dd(:).';
if1%%
dt = diff(t);
ifany(dt>1)fprintf('missing track-points at: \n%s',sprintf('%d:%02d : %d [s]\n',[round(m2ms((t(find(diff(t)>1))-t(1))/60)).';dt(dt>1)]));
% if any(diff(t)>2)% error('only solves single missing points');% endfor ii = fliplr(find(dt>1))
dd(1:end+dt(ii)-1) = [dd(1:ii-1)repmat(dd(ii)/dt(ii),1,dt(ii)) dd(ii+1:end)];
end
t = t(1):t(end);
% t1(cumsum([1 (diff(t)>1)+1])) = t;% d1(cumsum([1 (diff(t)>1)+1])) = dd;% d1(find(~t1)) = d1(find(~t1)-1)/2;% d1(find(~t1)-1) = d1(find(~t1));% t1(~t1) = t1(find(~t1)-1);end% comb = repmat(round(splittimes),2,1)+repmat([1:2]',1,length(splittimes));% window(comb(:)) = 1;% xc = xcorr(window,dd);% those = length(xc)-length(dd)-[0:length(dd)-splittimes(end)];% xcdt = detrend(xc(those),'linear',ceil(length(those)/2));% %plot(xcdt)% offset = findmin(xcdt);% figure(12345);% s1=subplot(211);plot(dd);line(offset,0,'marker','o','color','r');line(offset+splittimes,0,'marker','s','color','g');% s2=subplot(212);plot(xc(those));line(offset,xc(those(offset)),'marker','o','color','r');% set(s2,'xlim',get(s1,'xlim'));%%
m = 2;
comb = repmat(round(splittimes),m,1)+repmat([1:m]',1,length(splittimes));
window = [];
window(comb(:)) = 1;
iflength(window)>length(dd)
dd = [zeros(1,2*(length(window)-length(dd))) dd zeros(1,2*(length(window)-length(dd)))];
end
xc = xcorr(window,dd);
those = length(xc)-length(dd)-[0:length(dd)-splittimes(end)];
xcdt = detrend(xc(those),'linear',ceil(length(those)/2));
%plot(xcdt)
offset = findmin(xcdt)+floor(m/2)figure(12345);
s1=subplot(2,4,1:4);plot(dd*3600/1000);line(offset,0,'marker','o','color','r');line(offset+splittimes,0,'marker','s','color','g');
s2=subplot(2,4,5:6);plot([1:length(those)],xc(those));line(offset-floor(m/2),xc(those(offset-floor(m/2))),'marker','o','color','r');
n = 20;
x=reshape(offset+repmat(0*splittimes(:)',2*n+2,1)+repmat([-n:n nan]',1,length(splittimes)),1,[]);
y=reshape(offset+repmat(splittimes(:)',2*n+2,1)+repmat([-n:n nan]',1,length(splittimes)),1,[]);
s3=subplot(2,4,[78]);plot(x,dd(min(max(y,1),length(dd))));line(offset,0,'marker','s','color','r');
%%else%%[b,a] = butter(2,0.9);
dd = filtfilt(b,a,dd);
for ii = 1:(t(end)-t(1))-splittimes(end)+1
td(ii) = 0;
ti = ii+(1:splittimes(end))-1;
for jj = 1:length(splittimes)
deze(jj) = findmin(abs((t(ti)-t(1))-splittimes(jj)));
td(ii) = td(ii)+dd(deze(jj));
endend
offset = t(max(find(abs(td)==min(abs(td)))))-t(1);
%%end
s = sprintf('Estimated offset of GPS (nr of seconds the GPS was started before the splittimer): %0.1f [s]',offset);
fprintf('%s\n',s);
new_offset = inputdlg(strvcat(s,'Keep this value, or enter a different offset (based on the graphs):'),'Corect estimated offset',1,{sprintf('%0.1f',offset)});
drawnow;
if ~isempty(new_offset{1}),
if isempty(str2num(new_offset{1}))error('err-> invalid value: "%s"',new_offset{1});
end
offset = str2num(new_offset{1});
s3=subplot(2,4,[78]);
line(offset,0,'marker','s','color','m');
end
t_sync = t-t(1)-offset;
for jj = 1:length(splittimes)
splittimes_sync(jj) = t_sync(findmin(abs(t_sync-splittimes(jj))));
end
splittimes_abs = splittimes_sync+t(1)+offset;
fprintf('** finished reading tcx file **\n');
frewind(fid);
[fp,fn,fe] = fileparts(in_file);
outfile = fullfile(fp,[fn '_splits.tcx']);
fprintf('** writing output file: "%s" **\n',outfile);
fod = fopen(outfile,'w');
[fod,err] = fopen(outfile,'w');
if fod failed opening file "%s" for writing, with error: %s',outfile,err);end
distance_offset = 0;
phase = 0;
% phases:% 0 header% 1 first track header, until first point to be included% 2 first trackpoints being included% 3 other trackpoints being included% 4 buffering last point of current lap% 5 obsolete lap header% 6 last trackpoint writing% 7 trackpoints after last trackpoint% 8 trailer
trackpointbuffer = {};
lap = 0;
while ~feof(fid)
l = fgets(fid);
if phase==0
lp = sscanf(l,'%*[^<]<Lap%s'); % StartTime=%s');if ~isempty(lp) && phase==0
phase = 1;
% do not parse from hereendelse
lp = sscanf(l,'%*[^<]%c');
if ~isempty(lp) && phase>0
phase = 8;
% do parse trailer from hereelse
lp = sscanf(l,'%*[^<]<Creator%s'); if ~isempty(lp) && phase>0
phase = 8;
% do parse trailer from hereendendendifany(phase==[234])
lp = sscanf(l,'%*[^<]%c');
if ~isempty(lp)ifany(phase==[23])% not if phase is 4, since then already a lap was included here
phase = 5;
% do not parse from here, until next lap startedelseif phase==4% buffered, but continue including lap
phase = 3; % continue writing; lap is OK here
trackpointbuffer = {};
lap = lap+1;
endendend
laptext = [00];
ifany(phase==[456])
lp = sscanf(l,'%*[^<]%c');
if ~isempty(lp)if phase==6% last point passed, no output anymore except trailer
phase = 7;
fprintf(fod,l);
l = '';
laptext = [01];
elseif phase==4% copying last trackpoint for new track% inlude lap splitfprintf(fod,l);
laptext = [11]; % implicitly include trackpointbufferelseif phase==5% skip first trackpoint after lap, since it is identical
phase = 3;
l = '';
endendend
hms = sscanf(l,'%*[^<]<time>%*[^T]T%d:%d:%dZ</time>');
if ~isempty(hms)
timestr = sscanf(l,'%*[^<]<time>%[^Z]Z</time>');
if[60*60601]*hms>=splittimes_abs(1) && phase=splittimes_abs(end) && phase=splittimes_abs(lap+1) && phase%f');if ~isempty(lp)if phase==2
distance_offset = lp;
end
l = sprintf(' %0.7f\n',lp-distance_offset);
endendif laptext(2)fprintf(fod,' \n');
fprintf(fod,' \n');
endif laptext(1)
lap = lap+1;
fprintf(fod,' \n',timestr);
fprintf(fod,' %0.7f\n',diff(splittimes_abs(lap+[0:1])));
fprintf(fod,' Active\n');
fprintf(fod,' Manual\n');
fprintf(fod,' \n');
fprintf(fod,' \n');
endif phase==4ifall(laptext)fprintf(fod,'%s',trackpointbuffer{:});
trackpointbuffer = {};
phase = 3;
else
trackpointbuffer{end+1} = l;
endendifany(phase==[023468])fprintf(fod,'%s',l);
endendfclose(fod);
fclose(fid);
fclose('all');
fprintf('** finished successfully: splits were included in tcx file **\n');
function times = readtimes(in)
times = [];
offset = 0;
for ii = 1:length(in)
this = sscanf(in{ii},'%d%*[.:]%d%*[.:]%d');
iflength(this)==2if in{ii}(1)=='+'
offset = offset+[601]*this;
times(end+1) = times(end)+offset;
else
times(end+1) = [601]*this+offset;
endelseiflength(this)==3if in{ii}(1)=='+'
offset = offset+[60*60601]*this;
times(end+1) = times(end)+offset;
else
times(end+1) = [60*60601]*this+offset;
endendend% function strs = split(str,sep,include,num)% % SPLIT - split a string in substrings by separator% matches = [1 strfind(str,sep)+1 length(str)+2];% for ii = 1:length(matches)-1% strs{ii} = str(matches(ii)+(ii>1)*(size(sep,2)-1):matches(ii+1)-2);% endfunction[x,y,utmzone] = deg2utm(Lat,Lon)% -------------------------------------------------------------------------% [x,y,utmzone] = deg2utm(Lat,Lon)%% Description: Function to convert lat/lon vectors into UTM coordinates (WGS84).% Some code has been extracted from UTM.m function by Gabriel Ruiz Martinez.%% Inputs:% Lat: Latitude vector. Degrees. +ddd.ddddd WGS84% Lon: Longitude vector. Degrees. +ddd.ddddd WGS84%% Outputs:% x, y , utmzone. See example%% Example 1:% Lat=[40.3154333; 46.283900; 37.577833; 28.645650; 38.855550; 25.061783];% Lon=[-3.4857166; 7.8012333; -119.95525; -17.759533; -94.7990166; 121.640266];% [x,y,utmzone] = deg2utm(Lat,Lon);% fprintf('%7.0f ',x)% 458731 407653 239027 230253 343898 362850% fprintf('%7.0f ',y)% 4462881 5126290 4163083 3171843 4302285 2772478% utmzone =% 30 T% 32 T% 11 S% 28 R% 15 S% 51 R%% Example 2: If you have Lat/Lon coordinates in Degrees, Minutes and Seconds% LatDMS=[40 18 55.56; 46 17 2.04];% LonDMS=[-3 29 8.58; 7 48 4.44];% Lat=dms2deg(mat2dms(LatDMS)); %convert into degrees% Lon=dms2deg(mat2dms(LonDMS)); %convert into degrees% [x,y,utmzone] = deg2utm(Lat,Lon)%% Author: % Rafael Palacios% Universidad Pontificia Comillas% Madrid, Spain% Version: Apr/06, Jun/06, Aug/06, Aug/06% Aug/06: fixed a problem (found by Rodolphe Dewarrat) related to southern % hemisphere coordinates. % Aug/06: corrected m-Lint warnings%-------------------------------------------------------------------------% Argument checking%error(nargchk(2, 2, nargin)); %2 arguments required
n1=length(Lat);
n2=length(Lon);
if(n1~=n2)error('Lat and Lon vectors should have the same length');
end% Memory pre-allocation%
x=zeros(n1,1);
y=zeros(n1,1);
utmzone(n1,:)='60 X';
% Main Loop%fori=1:n1
la=Lat(i);
lo=Lon(i);
sa = 6378137.000000 ; sb = 6356752.314245;
%e = ( ( ( sa ^ 2 ) - ( sb ^ 2 ) ) ^ 0.5 ) / sa;
e2 = ((( sa ^ 2) - ( sb ^ 2)) ^ 0.5) / sb;
e2cuadrada = e2 ^ 2;
c = ( sa ^ 2) / sb;
%alpha = ( sa - sb ) / sa; %f%ablandamiento = 1 / alpha; % 1/f
lat = la * (pi / 180);
lon = lo * (pi / 180);
Huso = fix(( lo / 6) + 31);
S = (( Huso * 6) - 183);
deltaS = lon - ( S * (pi / 180));
if(la<-72), Letra='C';
elseif(la<-64), Letra='D';
elseif(la<-56), Letra='E';
elseif(la<-48), Letra='F';
elseif(la<-40), Letra='G';
elseif(la<-32), Letra='H';
elseif(la<-24), Letra='J';
elseif(la<-16), Letra='K';
elseif(la<-8), Letra='L';
elseif(la<0), Letra='M';
elseif(la<8), Letra='N';
elseif(la<16), Letra='P';
elseif(la<24), Letra='Q';
elseif(la<32), Letra='R';
elseif(la<40), Letra='S';
elseif(la<48), Letra='T';
elseif(la<56), Letra='U';
elseif(la<64), Letra='V';
elseif(la<72), Letra='W';
else Letra='X';
end
a = cos(lat) * sin(deltaS);
epsilon = 0.5 * log((1 + a) / (1 - a ));
nu = atan(tan(lat) / cos(deltaS)) - lat;
v = ( c / ((1 + ( e2cuadrada * (cos(lat)) ^ 2))) ^ 0.5) * 0.9996;
ta = ( e2cuadrada / 2) * epsilon ^ 2 * (cos(lat)) ^ 2;
a1 = sin(2 * lat );
a2 = a1 * (cos(lat)) ^ 2;
j2 = lat + ( a1 / 2);
j4 = ((3 * j2 ) + a2 ) / 4;
j6 = ((5 * j4 ) + ( a2 * (cos(lat)) ^ 2)) / 3;
alfa = (3 / 4) * e2cuadrada;
beta = (5 / 3) * alfa ^ 2;
gama = (35 / 27) * alfa ^ 3;
Bm = 0.9996 * c * ( lat - alfa * j2 + beta * j4 - gama * j6 );
xx = epsilon * v * (1 + ( ta / 3)) + 500000;
yy = nu * v * (1 + ta ) + Bm;
if(yy<0)
yy=9999999+yy;
end
x(i)=xx;
y(i)=yy;
utmzone(i,:)=sprintf('%02d %c',Huso,Letra);
endfunction ms = m2ms(m,textout)% min to min:sec% if second argument is true, then text is outputif nargin1 && ~~textout)ifany(ms(:,1)>=60)
f = '%d:%02d';
hms = [floor(ms(:,1)/60)mod(ms,60)];
else
f = '%02d';
hms = ms;
endifany(abs(m*60-round(m*60))>1e-3)
f = [f ':%06.3f'];
else
f = [f ':%02.0f'];
endif ~nargoutfprintf([f '\n'],hms.');
clear ms;
else
ms = num2str(hms,f);
endend
function splits2tcx(in_file,splits)
% om een extra neutralisatie-post in mee te nemen die niet in de splits zat, voeg een
% +0:17 (of andere tijd) toe op de plaats.
% gpsbabel = 'c:\localdata\bin\gpsbabel\gpsbabel.exe'
% CHECK various splits strings
force_tcx_conversion = 1; % force gpsbabel to convert tcx to tcx (to fix for example Android Garmin Uploader files)
if nargin support for %s files not yet implemented.\n',fe);
end
if nok
error('err-> conversion to .tcx file failed');
else
fprintf('done.\n'); % JHH
end
end
fprintf('** acquiring splits **\n');
if nargin0) % absolute times
if splits(1)~=splits(end)
warning('I expected the total time (1st data point) to be equal to the finish time (last data point). Netralized leg compensation?');
end
splittimes = [0 splits(2:end)];
else % relative times
splittimes = [0 cumsum(splits)];
end
fprintf('** using split times: "%s" **\n',reshape(strvcat(m2ms(splittimes'/60,1)',' '),1,[]));
fprintf('** reading tcx file: "%s" **\n',tcx_file);
t = []; tp = [];
d = []; dp = [];
ll = []; lp = [];
[fid,err] = fopen(tcx_file,'r');
if fid failed opening file "%s" for reading, with error: %s',tcx_file,err);
end
arm = 0;
while ~feof(fid)
l = fgetl(fid);
hms = sscanf(l,'%*[^<]<time>%*[^T]T%d:%d:%dZ</time>');
if ~isempty(hms)
t(max(length(d),size(ll,1))+1) = [60*60 60 1]*hms;
tp(max(length(d),size(ll,1))+1) = ftell(fid);
arm = 1;
else
dm = sscanf(l,'%*[^<]%f');
if arm && ~isempty(dm)
d(length(t)) = dm;
dp(length(t)) = ftell(fid);
if length(d)>length(t)
l
elseif length(d)<length(t)
l
end
arm = 0;
else
la = sscanf(l,'%*[^<]%f');
if arm && ~isempty(la)
ll(length(t),1) = la;
lp(length(t)) = ftell(fid);
else
lo = sscanf(l,'%*[^<]%f');
if arm && ~isempty(lo)
ll(length(t),2) = lo;
else
ls = sscanf(l,'%*[^<]');
if ~isempty(ls)
arm = 0;
end
end
end
end
end
end
if arm % last timepoint has no location or distance
if ~isempty(d)
t = t(1:length(d));
elseif ~isempty(ll)
t = t(1:size(ll,1));
end
end
findmin = inline('min(find(a(:)==min(a(:))))','a');
if ~isempty(d)
fprintf('%d timestamps; %d distances; %d splits; %d gaps\n',length(t),length(d),length(find(diff(t)==0)),length(find(diff(t)>1)));
else
fprintf('%d timestamps; %d distances; %d splits; %d gaps\n',length(t),length(ll),length(find(diff(t)==0)),length(find(diff(t)>1)));
end
lapsplit = find(diff(t)==0);
t(lapsplit) = [];
ll(lapsplit,:) = [];
if ~isempty(d)
d(lapsplit) = [];
dd = diff(d);
else
[x,y] = deg2utm(ll(:,1),ll(:,2));
dd = sqrt(sum(diff([x y]).^2,2));
end
dd = dd(:).';
if 1
%%
dt = diff(t);
if any(dt>1)
fprintf('missing track-points at: \n%s',sprintf('%d:%02d : %d [s]\n',[round(m2ms((t(find(diff(t)>1))-t(1))/60)).';dt(dt>1)]));
% if any(diff(t)>2)
% error('only solves single missing points');
% end
for ii = fliplr(find(dt>1))
dd(1:end+dt(ii)-1) = [dd(1:ii-1) repmat(dd(ii)/dt(ii),1,dt(ii)) dd(ii+1:end)];
end
t = t(1):t(end);
% t1(cumsum([1 (diff(t)>1)+1])) = t;
% d1(cumsum([1 (diff(t)>1)+1])) = dd;
% d1(find(~t1)) = d1(find(~t1)-1)/2;
% d1(find(~t1)-1) = d1(find(~t1));
% t1(~t1) = t1(find(~t1)-1);
end
% comb = repmat(round(splittimes),2,1)+repmat([1:2]',1,length(splittimes));
% window(comb(:)) = 1;
% xc = xcorr(window,dd);
% those = length(xc)-length(dd)-[0:length(dd)-splittimes(end)];
% xcdt = detrend(xc(those),'linear',ceil(length(those)/2));
% %plot(xcdt)
% offset = findmin(xcdt);
% figure(12345);
% s1=subplot(211);plot(dd);line(offset,0,'marker','o','color','r');line(offset+splittimes,0,'marker','s','color','g');
% s2=subplot(212);plot(xc(those));line(offset,xc(those(offset)),'marker','o','color','r');
% set(s2,'xlim',get(s1,'xlim'));
%%
m = 2;
comb = repmat(round(splittimes),m,1)+repmat([1:m]',1,length(splittimes));
window = [];
window(comb(:)) = 1;
if length(window)>length(dd)
dd = [zeros(1,2*(length(window)-length(dd))) dd zeros(1,2*(length(window)-length(dd)))];
end
xc = xcorr(window,dd);
those = length(xc)-length(dd)-[0:length(dd)-splittimes(end)];
xcdt = detrend(xc(those),'linear',ceil(length(those)/2));
%plot(xcdt)
offset = findmin(xcdt)+floor(m/2)
figure(12345);
s1=subplot(2,4,1:4);plot(dd*3600/1000);line(offset,0,'marker','o','color','r');line(offset+splittimes,0,'marker','s','color','g');
s2=subplot(2,4,5:6);plot([1:length(those)],xc(those));line(offset-floor(m/2),xc(those(offset-floor(m/2))),'marker','o','color','r');
n = 20;
x=reshape(offset+repmat(0*splittimes(:)',2*n+2,1)+repmat([-n:n nan]',1,length(splittimes)),1,[]);
y=reshape(offset+repmat(splittimes(:)',2*n+2,1)+repmat([-n:n nan]',1,length(splittimes)),1,[]);
s3=subplot(2,4,[7 8]);plot(x,dd(min(max(y,1),length(dd))));line(offset,0,'marker','s','color','r');
%%
else
%%
[b,a] = butter(2,0.9);
dd = filtfilt(b,a,dd);
for ii = 1:(t(end)-t(1))-splittimes(end)+1
td(ii) = 0;
ti = ii+(1:splittimes(end))-1;
for jj = 1:length(splittimes)
deze(jj) = findmin(abs((t(ti)-t(1))-splittimes(jj)));
td(ii) = td(ii)+dd(deze(jj));
end
end
offset = t(max(find(abs(td)==min(abs(td)))))-t(1);
%%
end
s = sprintf('Estimated offset of GPS (nr of seconds the GPS was started before the splittimer): %0.1f [s]',offset);
fprintf('%s\n',s);
new_offset = inputdlg(strvcat(s,'Keep this value, or enter a different offset (based on the graphs):'),'Corect estimated offset',1,{sprintf('%0.1f',offset)});
drawnow;
if ~isempty(new_offset{1}),
if isempty(str2num(new_offset{1}))
error('err-> invalid value: "%s"',new_offset{1});
end
offset = str2num(new_offset{1});
s3=subplot(2,4,[7 8]);
line(offset,0,'marker','s','color','m');
end
t_sync = t-t(1)-offset;
for jj = 1:length(splittimes)
splittimes_sync(jj) = t_sync(findmin(abs(t_sync-splittimes(jj))));
end
splittimes_abs = splittimes_sync+t(1)+offset;
fprintf('** finished reading tcx file **\n');
frewind(fid);
[fp,fn,fe] = fileparts(in_file);
outfile = fullfile(fp,[fn '_splits.tcx']);
fprintf('** writing output file: "%s" **\n',outfile);
fod = fopen(outfile,'w');
[fod,err] = fopen(outfile,'w');
if fod failed opening file "%s" for writing, with error: %s',outfile,err);
end
distance_offset = 0;
phase = 0;
% phases:
% 0 header
% 1 first track header, until first point to be included
% 2 first trackpoints being included
% 3 other trackpoints being included
% 4 buffering last point of current lap
% 5 obsolete lap header
% 6 last trackpoint writing
% 7 trackpoints after last trackpoint
% 8 trailer
trackpointbuffer = {};
lap = 0;
while ~feof(fid)
l = fgets(fid);
if phase==0
lp = sscanf(l,'%*[^<]<Lap%s'); % StartTime=%s');
if ~isempty(lp) && phase==0
phase = 1;
% do not parse from here
end
else
lp = sscanf(l,'%*[^<]%c');
if ~isempty(lp) && phase>0
phase = 8;
% do parse trailer from here
else
lp = sscanf(l,'%*[^<]<Creator%s'); if ~isempty(lp) && phase>0
phase = 8;
% do parse trailer from here
end
end
end
if any(phase==[2 3 4])
lp = sscanf(l,'%*[^<]%c');
if ~isempty(lp)
if any(phase==[2 3]) % not if phase is 4, since then already a lap was included here
phase = 5;
% do not parse from here, until next lap started
elseif phase==4 % buffered, but continue including lap
phase = 3; % continue writing; lap is OK here
trackpointbuffer = {};
lap = lap+1;
end
end
end
laptext = [0 0];
if any(phase==[4 5 6])
lp = sscanf(l,'%*[^<]%c');
if ~isempty(lp)
if phase==6
% last point passed, no output anymore except trailer
phase = 7;
fprintf(fod,l);
l = '';
laptext = [0 1];
elseif phase==4
% copying last trackpoint for new track
% inlude lap split
fprintf(fod,l);
laptext = [1 1]; % implicitly include trackpointbuffer
elseif phase==5
% skip first trackpoint after lap, since it is identical
phase = 3;
l = '';
end
end
end
hms = sscanf(l,'%*[^<]<time>%*[^T]T%d:%d:%dZ</time>');
if ~isempty(hms)
timestr = sscanf(l,'%*[^<]<time>%[^Z]Z</time>');
if [60*60 60 1]*hms>=splittimes_abs(1) && phase=splittimes_abs(end) && phase=splittimes_abs(lap+1) && phase%f');
if ~isempty(lp)
if phase==2
distance_offset = lp;
end
l = sprintf(' %0.7f\n',lp-distance_offset);
end
end
if laptext(2)
fprintf(fod,' \n');
fprintf(fod,' \n');
end
if laptext(1)
lap = lap+1;
fprintf(fod,' \n',timestr);
fprintf(fod,' %0.7f\n',diff(splittimes_abs(lap+[0:1])));
fprintf(fod,' Active\n');
fprintf(fod,' Manual\n');
fprintf(fod,' \n');
fprintf(fod,' \n');
end
if phase==4
if all(laptext)
fprintf(fod,'%s',trackpointbuffer{:});
trackpointbuffer = {};
phase = 3;
else
trackpointbuffer{end+1} = l;
end
end
if any(phase==[0 2 3 4 6 8])
fprintf(fod,'%s',l);
end
end
fclose(fod);
fclose(fid);
fclose('all');
fprintf('** finished successfully: splits were included in tcx file **\n');
function times = readtimes(in)
times = [];
offset = 0;
for ii = 1:length(in)
this = sscanf(in{ii},'%d%*[.:]%d%*[.:]%d');
if length(this)==2
if in{ii}(1)=='+'
offset = offset+[60 1]*this;
times(end+1) = times(end)+offset;
else
times(end+1) = [60 1]*this+offset;
end
elseif length(this)==3
if in{ii}(1)=='+'
offset = offset+[60*60 60 1]*this;
times(end+1) = times(end)+offset;
else
times(end+1) = [60*60 60 1]*this+offset;
end
end
end
% function strs = split(str,sep,include,num)
% % SPLIT - split a string in substrings by separator
% matches = [1 strfind(str,sep)+1 length(str)+2];
% for ii = 1:length(matches)-1
% strs{ii} = str(matches(ii)+(ii>1)*(size(sep,2)-1):matches(ii+1)-2);
% end
function [x,y,utmzone] = deg2utm(Lat,Lon)
% -------------------------------------------------------------------------
% [x,y,utmzone] = deg2utm(Lat,Lon)
%
% Description: Function to convert lat/lon vectors into UTM coordinates (WGS84).
% Some code has been extracted from UTM.m function by Gabriel Ruiz Martinez.
%
% Inputs:
% Lat: Latitude vector. Degrees. +ddd.ddddd WGS84
% Lon: Longitude vector. Degrees. +ddd.ddddd WGS84
%
% Outputs:
% x, y , utmzone. See example
%
% Example 1:
% Lat=[40.3154333; 46.283900; 37.577833; 28.645650; 38.855550; 25.061783];
% Lon=[-3.4857166; 7.8012333; -119.95525; -17.759533; -94.7990166; 121.640266];
% [x,y,utmzone] = deg2utm(Lat,Lon);
% fprintf('%7.0f ',x)
% 458731 407653 239027 230253 343898 362850
% fprintf('%7.0f ',y)
% 4462881 5126290 4163083 3171843 4302285 2772478
% utmzone =
% 30 T
% 32 T
% 11 S
% 28 R
% 15 S
% 51 R
%
% Example 2: If you have Lat/Lon coordinates in Degrees, Minutes and Seconds
% LatDMS=[40 18 55.56; 46 17 2.04];
% LonDMS=[-3 29 8.58; 7 48 4.44];
% Lat=dms2deg(mat2dms(LatDMS)); %convert into degrees
% Lon=dms2deg(mat2dms(LonDMS)); %convert into degrees
% [x,y,utmzone] = deg2utm(Lat,Lon)
%
% Author:
% Rafael Palacios
% Universidad Pontificia Comillas
% Madrid, Spain
% Version: Apr/06, Jun/06, Aug/06, Aug/06
% Aug/06: fixed a problem (found by Rodolphe Dewarrat) related to southern
% hemisphere coordinates.
% Aug/06: corrected m-Lint warnings
%-------------------------------------------------------------------------
% Argument checking
%
error(nargchk(2, 2, nargin)); %2 arguments required
n1=length(Lat);
n2=length(Lon);
if (n1~=n2)
error('Lat and Lon vectors should have the same length');
end
% Memory pre-allocation
%
x=zeros(n1,1);
y=zeros(n1,1);
utmzone(n1,:)='60 X';
% Main Loop
%
for i=1:n1
la=Lat(i);
lo=Lon(i);
sa = 6378137.000000 ; sb = 6356752.314245;
%e = ( ( ( sa ^ 2 ) - ( sb ^ 2 ) ) ^ 0.5 ) / sa;
e2 = ( ( ( sa ^ 2 ) - ( sb ^ 2 ) ) ^ 0.5 ) / sb;
e2cuadrada = e2 ^ 2;
c = ( sa ^ 2 ) / sb;
%alpha = ( sa - sb ) / sa; %f
%ablandamiento = 1 / alpha; % 1/f
lat = la * ( pi / 180 );
lon = lo * ( pi / 180 );
Huso = fix( ( lo / 6 ) + 31);
S = ( ( Huso * 6 ) - 183 );
deltaS = lon - ( S * ( pi / 180 ) );
if (la<-72), Letra='C';
elseif (la<-64), Letra='D';
elseif (la<-56), Letra='E';
elseif (la<-48), Letra='F';
elseif (la<-40), Letra='G';
elseif (la<-32), Letra='H';
elseif (la<-24), Letra='J';
elseif (la<-16), Letra='K';
elseif (la<-8), Letra='L';
elseif (la<0), Letra='M';
elseif (la<8), Letra='N';
elseif (la<16), Letra='P';
elseif (la<24), Letra='Q';
elseif (la<32), Letra='R';
elseif (la<40), Letra='S';
elseif (la<48), Letra='T';
elseif (la<56), Letra='U';
elseif (la<64), Letra='V';
elseif (la<72), Letra='W';
else Letra='X';
end
a = cos(lat) * sin(deltaS);
epsilon = 0.5 * log( ( 1 + a) / ( 1 - a ) );
nu = atan( tan(lat) / cos(deltaS) ) - lat;
v = ( c / ( ( 1 + ( e2cuadrada * ( cos(lat) ) ^ 2 ) ) ) ^ 0.5 ) * 0.9996;
ta = ( e2cuadrada / 2 ) * epsilon ^ 2 * ( cos(lat) ) ^ 2;
a1 = sin( 2 * lat );
a2 = a1 * ( cos(lat) ) ^ 2;
j2 = lat + ( a1 / 2 );
j4 = ( ( 3 * j2 ) + a2 ) / 4;
j6 = ( ( 5 * j4 ) + ( a2 * ( cos(lat) ) ^ 2) ) / 3;
alfa = ( 3 / 4 ) * e2cuadrada;
beta = ( 5 / 3 ) * alfa ^ 2;
gama = ( 35 / 27 ) * alfa ^ 3;
Bm = 0.9996 * c * ( lat - alfa * j2 + beta * j4 - gama * j6 );
xx = epsilon * v * ( 1 + ( ta / 3 ) ) + 500000;
yy = nu * v * ( 1 + ta ) + Bm;
if (yy<0)
yy=9999999+yy;
end
x(i)=xx;
y(i)=yy;
utmzone(i,:)=sprintf('%02d %c',Huso,Letra);
end
function ms = m2ms(m,textout)
% min to min:sec
% if second argument is true, then text is output
if nargin1 && ~~textout)
if any(ms(:,1)>=60)
f = '%d:%02d';
hms = [floor(ms(:,1)/60) mod(ms,60)];
else
f = '%02d';
hms = ms;
end
if any(abs(m*60-round(m*60))>1e-3)
f = [f ':%06.3f'];
else
f = [f ':%02.0f'];
end
if ~nargout
fprintf([f '\n'],hms.');
clear ms;
else
ms = num2str(hms,f);
end
end
Wie weet maak in nog een keer een .exe file hier van, of een online tool zodat je op mijn website jouw gpx/tcx files van splits kan voorzien. Laat hier onder, als commentaar, opmerkingen, wensen of suggesties achter. Mocht je handig zijn met Perl, PHP, Python, of zo, dan kan je wellicht deze, op zich redelijke simpele, code herschrijven.
N.B. De linkjes naar de filmpjes naast de filmprojector icons zijn links naar mijn eigen server, en een stuk trager dan de YouTube frames.
Op http://hamok.be/techniek/orientatielopen/ staat alles wat je wilt weten (met dank aan Luc Cloostermans, weet ik nu *). Wat ik niet wist was dat het bos in Ham behoorlijk vol staat. Met bomen (duh), maar ook doorntakken (inmiddels zonder bramen maar met stekels), kreupelhout, en bijzonder veel dunnen stammetjes. Ook op de witte stukken kaart. En des te groener was ik zelf na afloop, mijn armen, benen, en zelfs op mijn hoofd. Groen voelde ik me ook, want ik heb toch een paar behoorlijke beginnersfouten gemaakt.
Foutjes
Kijk maar eens naar deze kaartjes. Vooral de route van 1 naar 2 was erg slordig. Ik zou nu, als ik toch eenmaal op de verharde weg was beland, die hebben gevolgd, en het pad rechtstreeks naar post 2 hebben gekozen. Waarom ik dat niet deed, en ging dolen, weet ik niet. Ik kwam onderweg Thomas van der Kleij tegen, en dacht dat hij al van 2 vandaan kwam. Dus ging ik de kant op waar hij uit kwam. Fout!
Zie hier het filmfragment:
En dan het stuk van 22 naar 23! Ik ben gewoon over de post heengelopen, volgens mijn GPS, en ben vervolgens gaan dolen. Nou ja, op zich verstandig om een referentie te zoeken, maar waarom ik nou helemaal een rondje heb gemaakt?
Als ik naar de splits kijk ging het nog niet zo slecht. Kon beter, maar ik ben niet ontevreden. Het beste wat ik kan doen is de balans opmaken, en er van leren. Want ik ben niet heel overdreven tevreden over mijzelf. Vermoedelijk had ik verwacht dat met mijn nieuwe hoofdlampje het lopen vanzelf zou gaan.
Leermomenten
Drie dingen gingen mis:
het niet vinden van punten (door te grote risico’s nemen op de verkeerde momenten),
minder optimale routekeuzes (door niet goed genoeg op de kaart te kijken), en
tijdverlies door stilstaan om op de kaart te kijken, deze te plooien, veters te strikken, hoofdlampje her aan te sluiten, en te zoeken waar ik ook alweer was op de kaart.
Wat doe ik er aan? Er zit wat tegenstrijdigs in. Enerzijds maak ik wat foutjes die toe te schrijven zijn aan het niet-de-tijd-nemen om goed op de kaart te kijken, om de juiste, snelste danwel veiligste, route te kiezen (en juist de afweging tussen die twee vergt goed kaart kijken). Anderzijds moet het sneller, minder tijd kaartlezen en harder lopen. Want Quickroute is onverbiddelijk: 25% van mijn tijd heb ik langzamer dan 15 min/km gelopen, geschuifeld of stil gestaan. Niet goed. En dat kwam niet doordat het af en toe behoorlijk glad was.
Stress is niet goed. Het gevoel dat ik door moet lopen, ook als ik even niet weet waar heen, moet onderdrukt worden! Beter dan stilstaan? Niet die keer dat ik lijnrecht de verkeerde kant op van de post rende. Gelukkig maar 30 meter.
Kaartlezen tijdens het lopen, dat zou tijd schelen. Ik heb een GPS track van Ralph Kurt gezien. Die gaat maar door. Ooit vertelde hij me dat hij geoefend heeft door de krant te lezen tijdens het joggen. Moet ik ook maar eens gaan doen.
Terrein inschatten is een vak. Meer dan eens bleek “wit” bos door doorntakken en talloze jonge stammen onbegaanbaar, en was “groen” bos prima doorloopbaar op begane grond niveau. Dat had ik na een paar keer mijn neus stoten toch moeten weten. Gaat doorsteken vaker fout dan goed? Pak dan in het vervolg de paden. Meer dan 40% om is het zelden, en meestal 20% sneller. Als je voor dat tijdverlies wel de zekerheid hebt de post te vinden is het geen slechte deal.
Ik moet gedisciplineerder mijn kaart vasthouden. Niet steeds overpakken naar de andere hand, en mijn vinger, de punt van het kompas, de nul van mijn schaal, wat dan ook, op de juiste plek houden. Zodat ik direct, bij een blik op de kaart, zie waar ik ben. Misschien moet mijn schaaltje van het kompas, zodat die het zicht niet beperkt.
De Verkeerslichten Methode gebruiken om op het juiste moment vol gas te geven als het niet kritisch is om mijn positie op de kaart exact te volgen. En zorgvuldig te werk gaan als het lastig wordt. Ook al komt een gokje vaak wel goed, als het mis gaat kost het veel tijd.
Materiaal
En ik heb nog wat opmerkingen over mijn gebruikte materiaal. Dat overigens steeds meer wordt, in aantal. (Het begon zo mooi, mijn eerste OL vorig jaar, met alleen een kompas en wat kleren, en een zaklamp. Maar inmiddels heb ik een duimkompas, een GPS-horloge, een hartslagband, een hoofdlamp, een accu, een GPS-tracker, een passen-schaalverdeling, een headcam, scheenbeschermers, een postomschrijvinghoesje, en een fluitje. Wat een ballast!)
De schaalverdeling die ik op mijn kompas heb mijn geplakt, uitgemeten in passen ik gemiddeld terrein, zit in de weg. Ik merk dat ik af en toe mijn kaart van hand wissel omdat hij onder m’n kompas niet handig leest. Toch een andere schaal? Hij is ook wel weer handig. Hier moet ik maar weer eens mee experimenteren.
Hoofdlampje is top. Veel licht, dimmen is onzin, hoe meer licht hoe beter, en hij strooit bovendien veel rest-licht in het rond, wat ideaal is om het pad pal voor je neus te zien, takken die je moet ontwijken over 0.2 s, en de kaart te lezen zonder jezelf te verblinden. Maar het is wel onhandig dat onderweg drie keer mijn stekkertje door een tak uit de accu werd getrokken, zodat ik plotsklaps in het stik-donker stond. Een knoop in het snoer, rondom de interconnectie, is de oplossing, maar niet elegant. Volgende keer snoer onder mijn shirt, of iets met tape of klittenband.
Die accu (4×18650 Li-ion = 4400 mAh) is een blok aan het been. Of aan het heuptasje. Dat alle kanten op slingert. Niet fijn. Nog een 2e generatie houder voor verzinnen. Heb ik mooi weer wat te doen.
De elastische hoofdband waaraan zowel mijn lampje als mijn camera hangen, ziet wat strak. Volgende keer koop ik 1 cm meer elastiek. Tja, met €0,40 naar de fourniturenzaak in de wijk fietsen is misschien wat optimistisch geweest.
Het is niet zo handig als je camera voortijdig uit gaat. Tape-je over de schakelaar? Of gewoon reageren als het piep-piep-ik-ga-uit toontje klinkt?
Headcam video
Ik had mijn Contour Roam weer meegenomen. Helaas ging hij 8 minuten voor de finish uit toen ik tegen een boom liep. Gevoeld, knop leek nog aan, maar dat bleek niet zo te zijn. Jammer. Ik ga nog kijken of een nacht-video bruikbaar is, of of ik RGmapVideo aan ga slingeren.
Een stukje camerawerk in het donker:
Bier
Erg leuk nog een biertje gedronken na afloop. Gezellige kerels van Hamok (bijna hebben ze een Hamok-softshell aangesmeerd -mooi spul, daar niet van, maar eerst maar eens een KOVZ kloffie aanschaffen-) en KOL die graag wilden dat ik met een te hoog promillage naar huis reed. En daar hoorde ik dat er van het O-handboek ook een papieren off-line versie bestaat. En dat sommige woorden in het Vlaams iets heel anders betekenen dan in het Nederlands 🙂
De grote vraag is of ik genoeg discipline heb om na elk stukje hardlopen de gegevens in te voeren op Attackpoint, maar het is een mooi streven.
Ik kende de site al wel langer, maar werd geprikkeld door een mail van A3, gisteren:
Beste KOVZers,
Er wordt de laatste maanden door een redelijke groep lopers dankbaar gebruik gemaakt van de inspanningen van Peter. Of te wel, er wordt flink getraind. En dan hoor ik ook nog eens dat een steeds grotere groep KOVZers aan looptraining doet. Hartstikke goed natuurlijk, zo gaan de prestaties lekker vooruit.
Een volgende stap is het registreren van je trainingen, attackpoint (een online gratis trainingslogboek) is daar een goed hulpmiddel voor. Ik hoor een aantal mensen al denken ‘wat is daar nou het nut van’? Dat kan meer omvattend zijn dan je denkt, hieronder een paar van de vele voordelen:
Je kunt als je een b.v. blessure oploopt terug kijken wat je anders/meer hebt gedaan dan normaal. Dat geeft je een handvat voor de toekomst (rustiger opbouwen)
Je kunt als je uitstekend in vorm raakt terug kijken hoe je dat gefikst hebt en dat in een volgend seizoen nog eens over doen.
Het is soms voor jezelf een motivatie om toch te gaan trainen.
Het kan voor anderen een voorbeeld/stimulans/motivatie zijn om ook te trainen.
Je kunt reageren op een log van andere lopers en ze een hart onder de riem steken of je bewondering uitspreken.
Als je ook nog eens aanmeld bij de KOVZ en NOLB groep en kijkt wat en hoe anderen het doen is het ook nog eens saamhorigheids bevorderend, lekker voor onze vereniging.
en nog veel meer…………kijken dus.
Waar kun je je aanmelden? http://www.attackpoint.org Je kunt daar al je gegevens invoeren en vergeet niet om ook lid te worden van de KOVZ groep!! (een aantal KOVZers zijn al actief maar hebben zich nog niet bij onze groep aangemeld) Benieuwd wie zich al wel in de KOVZ groep hebben gemeld? Meld je snel aan, ook als je alleen af en toe een wedstrijdje loopt en alleen maar de KOVZ trainingen af en toe meeloopt.
O-groeten,
Adrie.
Twee maanden later: Inmiddels heb ik vrijwel alles wat ik sneller gelopen heb dan stapvoets, sinds oktober vorig jaar, in Attachpoint gezet. En ik houd het nog steeds bij. Het is inderdaad motiverend om weer een paar kilometers en uren te kunnen noteren. Alsof het lopen een 2e nut heeft, behalve dan een vluchtige vermoeiing en wat langer blijvende conditieverbetering. Alsof je een geocache logt, zo iets. Maar dan minder nutteloos.
My new secret weapon is so secret, it can hardly be used (without dazzling myself).
Een paar eerste bevindingen:
Er komt heel veel licht uit. Zo veel dat toen ik hem vergelijk met mijn Philips lampje, ik eerst dacht dat die laatste het niet deed, want ik zag geen bundel. Ik was kennelijk wat verblind, en de Cree XML-T6 deed de spot van de 3W Luxeon verbleken.
Ik heb geen idee of er 1200 lumen uit komt. Ik lees overal dat het minder is. Meten is lastig, maar met de datasheet in de hand en een stroommeter komen we vast een heel eind. Er gaat 1.87 [A] door de LED zelf heen, als hij op maximale sterkte brandt. Gedimd is dat nog maar 0.9 [A], waarbij de stroom op 50 [Hz], met een duty cycle van ~50% wordt gemoduleerd. De datasheet zegt dat er iets van 235% “relative flux” uit komt, bij 1.9 [A], en 125% bij 0.9 [A].
Er komt maar 660 lumen uit, tegen 1200 volgens spec. Nog steeds een boel licht, en, wat verwacht je, voor 35 Euro?
Dat is dan ten opzichte van de 700 [mA] waarbij de nominale opbrengst wordt gegeven, wat, uitgaande van een Cool White type, overeenkomt met 280 [lumen]. Kortom, 350 [lumen] in gedimde toestand, en 660 [lumen] op maximaal vermogen. Ik vind het genoeg, maar het is niet de 1200 Lumen die op de doos staat.
De batterijen moeten eerst opladen. De lader is voor US-stopcontacten, dus ik heb er maar een Euro-stekker aan gesoldeerd. Lijkt een “domme” lader, maar er zit een LED op die na verloop van tijd van rood naar groen kleurt, dus ik vermoed dat hij toch de lading stopt als de Li-ion accu’s vol zijn. Duurt een paar uur.
De constructie van de lamp is behoorlijk stevig. Alles is van massief aluminium gemaakt, en in de juiste vorm gedraaid. Dit is goed voor de koeling.
De lamp zelf lijkt redelijk waterproof, al is de rubber O-ring in de behuizing gescheurd doordat hij er niet voorzichtig in is gezet. Maar de batterijen zijn met wat krimpfolie bijeen gehouden, en aan het uiteinde zit karton. Niet echt waterbestendig, dus. Eens kijken of ik wat kan afdichten met tape. Ik ga er niet mee zwemmen…
Gelukkig maakte ik, voordat ik hem aansloot op de accu’s, de behuizing van de lamp open. Midden tussen de printbanen van de elektronica lag een braam van aluminium. Een restje van de draaibank, vermoedelijk, maar wel een potentiële kortsluiting en daarmee vroegtijdig einde van de lamp.
Hij kent 3 standen: aan op volle sterkte, gedimd (iets van 50%), en knipperend (9 Hz). Op zich lastig dat je door alle standen heen moet klikken. Ik zou het handiger vinden als één keer klikken de lamp aan zou zetten, en zou schakelen tussen 100% en 50%, en weer terug, en je met 2 keer achter elkaar klikken de lamp uit zou zetten. De flikker-mode is volstrekt nutteloos.
De bundel is behoorlijk scherp en smal, maar volgens mij wel prima bruikbaar. Er is een aardige spill om de centrale bundel heen, zodat je ook de grond voor je kan zien. Mooier zou een horizontaal afgeplatte bundel zijn, maar dat is denk ik wat te veel gevraagd.
Er zit een lampje achterop, dat voor zover ik kan zien altijd rood+groen brandt. Ik heb nog geen indicatie ontdekt voor de status van de batterij.
De hoofdband die er bij zit is véél te krap. Op de wijdste stand knelt hij nog. Ik denk dat Chinese hoofden wat kleiner zijn, of de hoofdband is gewoon een unique selling-point en er is verder totaal niet functioneel over nagedacht.
Als ik hem met de bijgeleverde hoofdband op mijn hoofd zet, voor zo ver dat lukt, staat hij eigenlijk iets te laag afgesteld, en wijst richting grond. Hij kan wel verder omlaag, maar niet omhoog. Een aanpassing is eigenlijk wel nodig.
Het snoer van lamp naar batterij-unit is lang genoeg om de laatste in mijn heuptasje op mijn rug te bevestigen, en de eerste op mijn hoofd, dus da’s prima.
Op de fiets, aan het stuur gemonteerd (met bijgeleverde rubber snaar, zakt de lamp omlaag als ik over een hobbel rijd. Daar moet nog wat stroef rubber tussen; een stukje binnenband of zo iets.
Binnenin zat niet alles goed aangedraaid. Dat helpt natuurlijk niet voor de temperatuur huishouding. Daarom heb ik alles strak aangedraaid, nadat ik koelpasta tussen de delen had gesmeerd.
De uitlijning van de LED en de parabool reflector was niet zo perfect. Dat was eenvoudig te verhelpen door hem voorzichtig open en dicht te schroeven.
De rubber O-ring tussen het voorste venster en de behuizing is fluoriserend, en gloeit ná in het donker. Fancy, maar je hebt er weinig aan.
Er valt nog het één en ander aan te tweaken, dus ik kan weer lekker aan de slag:
De 3-modes aanpassen en eventueel dimbaar maken. Binnenin zit een geregelde voeding. Het lijkt er op dat een Atmel 24C02N wordt gebruikt voor de programmering, hoewel dat een Eeprom is volgens het spec-blad. Ik moet nog eens goed uitzoeken hoe het werkt. Als ik er een ATtiny13 in kan zetten kan ik hem maken zoals ik wil. We gaan het zien.
Een helderheids-instelling met een schakelaar aan het draadje maken, zodat ik niet naar mijn hoofd hoef te grijpen om de lichtsterkte in te stellen.
Focus: als ik de positie van de parabool spiegel ten opzichte van de LED in kan stellen kan ik de focussering een beetje aanpassen, en indien gewenst de bundel breder maken. Kost wel wat licht, want de parabool kan alleen verder van de LED, en dus ga ik licht verliezen dat achter de parabool langs valt.
Maar al met al is het een felle lamp voor relatief weinig geld. Ik moet hem nog een keer met een Led Lenser H14-R vergelijken.
Eindelijk weer eens een nacht-OL gelopen. Leuk dat het was! Een stuk beter dan vorige week, ging het, en dat scheelt. Eigenlijk maar een enkele kleine foutjes gemaakt, maar allemaal acceptabel. Niet echt vanwege verkeerde route-keuzes.
Het begon met wat twijfels. Ik had met Ralph afgesproken om mee te rijden, maar ik voelde me verre van lekker. Niet alleen omdat ik wat te zwaar gelunched had. Maar, niet zeuren, was het devies, en als ik eenmaal aan het lopen ben ligt mijn focus helemaal daar op.
Koud was het wel, dus met een thermo, een sport-fleece, en een ASML-windjack, op pad. Geem moment heb ik het, al lopend, koud gehad, maar warm ook niet. Opvallend was dat mijn jack wel helemaal nat was aan de binnenkant na afloop, dus genoeg is er wel gezweet. En wat ik aan had was precies goed.
Materiaal
Even was ik zenuwachtig of ik wel de juiste spullen bij me had. Kleding bleek OK. Had ik een bril tegen de uitstekende takken op moeten doen? Vermoedelijk was die meteen beslagen in de mist. Overdag maar eens proberen. Maar belangrijker in het donker, hoe kan het ook anders, is het licht.
Een hoofdlampje leek me handig voor het lezen van de kaart. Fel genoeg om mee te kijken waar ik liep was dat lampje van Xenos, van 3 euro, niet. Maar met de mist gaf het toch een hinderlijke waas voor mijn ogen, dus verplaatste ik het lampje van mijn voorhoofd naar mijn hals. Maar daar bleek het niet handig, want de bundel scheen meer op mijn borst dan op de kaart. Volgende keer zal ik hem aan moeten passen zodat hij meer naar voren schijnt; zo kan een kaart-lamp wel heel handig zijn.
Want mijn andere lamp, een Philips SFL7380, met een 3W Luxeon LED, die normaal iets van 60 lumen geeft bij 3.8V voeding, doet het op 3 lithium batterijen toch een stuk krachtiger, met een voeding van zo’n 4.8V. Zo fel dat je verblind bent als je direct op de kaart schijnt. Maar om mijn weg te vinden was hij zeker niet verkeerd. Alleen heb je geen handen vrij om kaart te lezen. En zit hij de EMIT in de weg, die ik ook in de niet-kaart-en-kompas hand heb. Da’s alles. Maar het heeft zo wel zijn voordelen:
In de mist is een lamp verder van je ogen een stuk aangenamer, want je kijkt niet tegen de reflectie van de verstrooiing van de bundel aan.
Je kan makkelijk heen en weer schijnen, op zoek naar een reflectie van een post. Sneller dan je met je hoofd kan draaien.
Als je een reflector zoekt kan je altijd nog de zaklamp bij je ogen in de buurt houden, om een betere reflectie te krijgen.
Je kan de bundel naast de kaart richten; met een hoofdlamp schijnt die altijd waar je kijkt.
Kortom, een zaklamp is zo gek nog niet. Maar toch ga ik het eens proberen met een hoofdlampje, zodra de made-in-China Cree XM-L T6 die ik een maand geleden besteld heb, binnen is. 12oo lumen! Als ik de specs moet geloven.
Donker is makkelijk
Je kan hier leuk zien hoe mijn route zich verhield tot die van de anderen. Zo zie je dat ik naar post 2 en 20 bijzonder langzaam was, want iedereen was sneller, maar op weg naar 6, 10, en 11 weer relatief snel (de andere lijntjes liggen onder mij). Posten 6, 10, 11, 12, en 18 waren lastig, maar heb ik zo te zien best snel gevonden.
En dat meen ik serieus. Net als ik autorijden in het donker aangenaam vind, omdat je alleen ziet wat je moet zien, zie je bij een OL in het donker ook bepaalde details makkelijker, zoals de reflector op de post. Het gaat dus meer om het plannen van de route, dan het zoeken naar de posten zelf, en volgens mij is dat ook meer het idee achter orientatielopen.
Aan de andere kant, je kan wel makkelijk achter anderen aanlopen. Volgens mij zie je ook in de splits-grafieken, dat er meer groepjes ontstaan: kijk maar eens naar de “Race graph” in de Splitsbrowser. Vooral het zoeken naar de post. Opeens zie je een lampje in de verte stilstaan, omlaag richten, en plotseling omdraaien en weglopen. Aha, daar moet je dus zijn. Ralph vertelde me dat hij vroeger vaak zelfs zijn lamp uit deed vlak bij de post, en pas weer aan als hij weer weg was, om anderen niet te veel te helpen. Is het flauw, om hier gebruik van te maken? Welnee, iedereen zou het doen. Maar eenmaal in een groepje bij elkaar raak je de volgers niet zo makkelijk weer kwijt. Ben je slecht in zoeken, dan heb je voordeel, maar vind je makkelijker de posten dan anderen, dan werkt het tegen je.
Kaart
(klik op de kaart om naar een grotere kaart te gaan)
Ik ga niet de hele route in detail beschrijven, en mijn beslispuntjes uitleggen. Kijk zelf maar naar de kaart van mijn route. Er zijn wel een paar punten waar ik wat sneller had kunnen zijn. De route naar 1, de vergissing bij 2, de omweg naar 4, klein foutje bij 9, en net na 15, en het zoeken naar 17. Verder ging alles redelijk ideaal.
Het eerste stuk was even wennen. Vooral aan de mist. Geklungel met mijn lampjes, te weinig handen, en een gevoel van tijdsdruk waardoor het eigenlijk wat minder efficiënt werd.
Daarna ging alles eigenlijk heel soepel. Niet alleen ik maakte gebruik van andere lampen, anderen hebben duidelijk profijt gehad van mijn af-en-toe snelle post-vondsten. Vaak bleek het sneller om over de paden te lopen, behalve dan het lange stuk naar post 4, waar we (dat stuk kwam ik Ralph tegen, en we liepen even hard) denk ik beter door kunnen steken naar de open plek net oostelijk van het pad. Het was immers goed doorloopbaar bos (volgens de kaart).
Ondanks de lampen om me heen overal zelf gezocht, behalve op weg naar 12. Daar liep zo’n kluit lopers om me heen, dat iedereen achter de voorste aan rende. Leek wel veilig. Achteraf was het westelijke pad denk ik toch te beste optie geweest, alleen riskant hoe ver je moest doorlopen voordat je het oostwaarts het bos in moest naar de post.
Maar wat me vooral opviel was de vele tijd die ik stilstond. Als ik gemiddeld tussen de 4,5 en 7,5 min/km loop, en het gemiddelde over de hele loop op bijna 12 min/km uitkomt, dan sta ik de halve tijd stil. En bij de posten heb ik 21 minuten binnen de 45 meter van het punt gedraald, wat ook vooral kaartlezen is. Kortom, als ik wat wil verbeteren, zal ik, behalve beter kaartlezen, vooral korter moeten kaartlezen. Dat kan nog een uitdaging worden. Een handiger lampje is één, maar lezen tijdens het lopen, en minder vaak lezen -beter onthouden- is nog belangrijker.
20% van de tijd stond ik de kaart te lezen. En even lang liep ik langzamer. Daar valt nog een hoop te verbeteren.
Ik denk dat vooral daar veel te halen valt. Dat wordt dus een aandachtspuntje voor de volgende keer.
Mijn ene GPS-tracker heb ik uitgeleend (de iGotU; die ligt al een half jaar in Den Haag) en de andere ligt ergens op de Oostelbeerscheheide. Hij weet waar hij is – ik niet. Verloren onderweg. Zonde. Het was wel mijn favoriete, de Qstarz BT-1000X. Wat doe je er aan? Ik heb zoveel rare routes gelopen tijdens de OL daar, en ben op plekken geweest die ik me niet meer kan herinneren (omdat ik niet wist waar ik precies was), dat ik hem nooit meer terug kan vinden. Bovendien was de helft van het terrein bedekt met losse herfstbladeren, en de andere bestond uit los zand, zodat hij ongetwijfeld ergens onder ligt. De enige oplossing is een nieuwe bestellen. Bij www.snelwebshop.nl dan maar weer?
Zo gezegd, zo gedaan. Want het is toch wel erg leuk om je route achteraf te kunnen bekijken.
Werktuigbouwers bedoelen hier mee standaardformules om stijfheden van elementen uit te rekenen, mensen-met-groene-vingers duiden er blauwe bloemetjes mee aan, maar het kan ook slaan op feitjes die je gewoon moet kennen. En bij Oriëntatielopen zou ik de symbolen voor de locaties van controle-posten zo noemen.
Maar omdat ik nog vrij nieuw ben in dit spel heb ik een Handig Lijstje® (niet te verwarren met de Handige Kaartjes® die ik voor Geocaching gebruik) gemaakt met alle bekende tekentjes. Het is wat sneu als je naar een kuil zoekt als je een heuveltje moet hebben. Dus (of het mag of niet weet ik niet) neem ik in credit-card formaat mee wat ik eigenlijk uit mijn hoofd zou meten weten. En -mooi meegenomen- ken ik na het stoeien met de lay-out bij het maken van de kaartjes, alle tekentjes toch wel van buiten.
Zo zien ze er uit (klik op het plaatje om dit als PDF file te downloaden):
handig is ook de schaalverdeling aan de rand, in 32 passen per 100m, op een schaal van 1:5000, 1:7500, 1:10000 en 1:15000.
Naderhand heb ik de kaartjes even door de lamineerder gehaald (ooit 15 euro bij Aldi), zodat er een handig, robuust, waterproof resultaat ontstond.
Uiteraard heb ik de symbolen van de diverse sites met postomschrijvingen gehaald. Als het goed is zijn ze overal het zelfde. Alleen verschilde de Nederlandse vertaling nog her en der.
Het klinkt eenvoudiger dan het is: neem een stuk elastiek, naai er klittenband op, en verder een zakje van gaas en nog wat elastiek er omheen, stop er een GPS-tracklogger in, en gaan.
Het concept is leuk, het resultaat volgens mij ook, alleen blijkt het bedienen van een naaimachine lastiger dan gedacht, vooral als je door iets te veel lagen tegelijk heen wilt naaien. Het ding hapte steeds 20 draden tegelijk rond de onderspoel.
En het bleek niet zo eenvoudig om een soort zakje van gaas te maken, en dat van binnen uit aan het elastiek te naaien. Maar uiteindelijk is het gelukt.
Zie hier het resultaat: een elastische schouderband om een GPS in te dragen, zodat de ontvangst, en daarmee de nauwkeurigheid van de resultaat track, stukken nauwkeuriger is, zo is me gebleken, dan wanneer ik hem in mijn broek of een heuptasje draag.
Om te voorkomen dat hij de hele tijd heen en weer schuift over mijn arm heb ik aan de onderkant vier lijntjes rubbercement getrokken. Dat is een soort bandenplak-uit-een-tube die ze bij de kampeer/bergsportzaak verkopen om campingmatrassen te repareren als ze lekken. Het levert een flexibele rubber randje dat op de stof blijft liggen, en lekker stroef is. Maar misschien kan het ook met transparante siliconenkit, wat een stuk goedkoper is.
Ervaring: Het komt nog best kritisch hoe strak je hem doet. Hij is dan wel elastisch, maar als je niet wilt dat hij schuift zal hij toch een zekere strakheid moeten hebben. Maar niet te strak, want dan krijg je een tintelende hand en/of arm omdat de bloedsomloop wordt gehinderd.
Vandaag heb ik eens mijn beide GPS trackers vergeleken. Nou, dat is beroerd. De ene geeft nog een slechtere tracklog weer dan de andere. Maar beide zijn ze niet om over naar huis te schrijven. Ik ga het een volgende keer eens vergelijken met mijn Garmin eTrex Vista HCx. Ook daar zit een Sirfstar-III chipset in, net als in de i-gotU, volgens mij heeft die een stuk minder afwijking. Het kan natuurlijk ook komen door de plek waar ik de trackers draag: in mijn heuptasje. Maar ja, hoe monteer je ze op je hoofd?
Twee GPS trackers zijn binnengekomen. Ik was op zoek gegaan naar een manier om achteraf mijn route te bekijken, en mijn normale GPS, met scherm en topografische kaart, dat kan natuurlijk niet bij een orientatieloop. Maar deze apparaatjes, ter grootte van een luciferdoosje, zonder scherm en met slechts een knop en een paar LED’s, dat mag wel. Ter vergelijking, de Qstarz BT-Q1000XT eXtreme Travel Recorder, met een MTK II Chipset, en de i-gotU GT-600 Travel-/Photo Sports logger met een iets oudere SiRFIII chipset . Binnenkort een review over de resultaten en prestaties van de beide dingen.
 Jaren terug kocht ik een GPS logger: zo’n klein apparaatje dat niet helpt om te weten waar je bent maar wel om terug te vinden waar je was. Mits je voldoende goed wist waar je was en vervolgens de weg naar huis en de PC hebt weten te vinden.
Jaren terug kocht ik een GPS logger: zo’n klein apparaatje dat niet helpt om te weten waar je bent maar wel om terug te vinden waar je was. Mits je voldoende goed wist waar je was en vervolgens de weg naar huis en de PC hebt weten te vinden. Er zijn overigens wel meer voordelen ten opzichte van een hardloophorloge met GPS, en de belangrijkste daarvan is de levensduur van de batterij en de capaciteit van het geheugen. Er is simpelweg geen horloge dat daar aan kan tippen. Noem maar eens een ander apparaat dat 32 uur continue elke seconde een locatie kan opslaan zonder tussentijds uitlezen en opladen. Heb je dat nodig dan? Ja, ik wel. Soms.
Er zijn overigens wel meer voordelen ten opzichte van een hardloophorloge met GPS, en de belangrijkste daarvan is de levensduur van de batterij en de capaciteit van het geheugen. Er is simpelweg geen horloge dat daar aan kan tippen. Noem maar eens een ander apparaat dat 32 uur continue elke seconde een locatie kan opslaan zonder tussentijds uitlezen en opladen. Heb je dat nodig dan? Ja, ik wel. Soms.
 Maar dat kwam doordat ik nog niet de specifieke voor- en nadelen realiseerde. Een GPS hardloophorloge gebruik je voor trainingen en wedstrijden van hooguit een paar uur, voor de routineuze loopjes waarbij je snel je tracks wilt downloaden, uploaden, en analyseren. Het moet vooral praktisch zijn; liefst zet je horloge de handel direct op Strava zodra er WiFi in de buurt is. En ik heb, zoals gezegd, nog geen wedstrijd meegemaakt waar mijn TomTom Multi-sport Cardio of mijn Garmin Forerunner 305 verboden was.
Maar dat kwam doordat ik nog niet de specifieke voor- en nadelen realiseerde. Een GPS hardloophorloge gebruik je voor trainingen en wedstrijden van hooguit een paar uur, voor de routineuze loopjes waarbij je snel je tracks wilt downloaden, uploaden, en analyseren. Het moet vooral praktisch zijn; liefst zet je horloge de handel direct op Strava zodra er WiFi in de buurt is. En ik heb, zoals gezegd, nog geen wedstrijd meegemaakt waar mijn TomTom Multi-sport Cardio of mijn Garmin Forerunner 305 verboden was.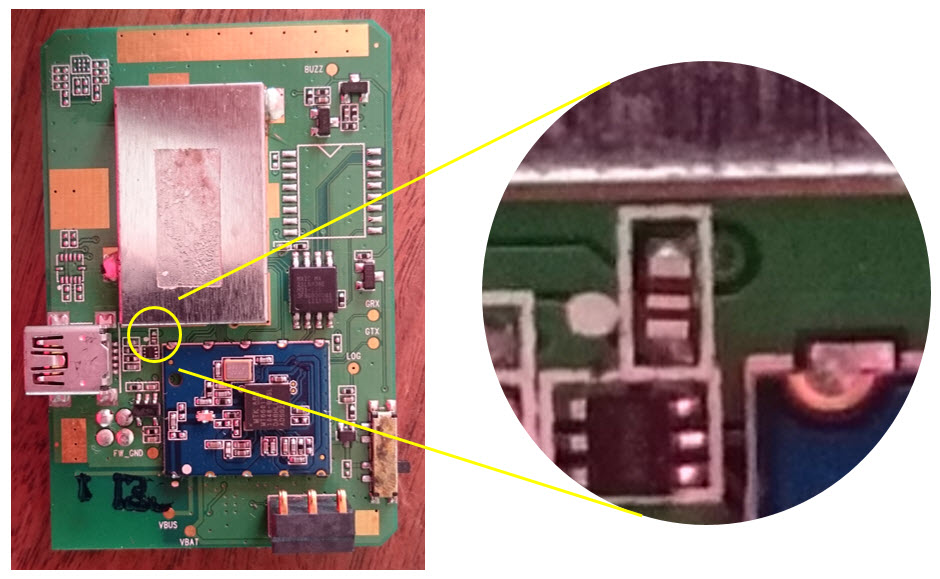 Weer vergelijk ik de twee loggers, maar nu door het betreffende component op het werkende exemplaar door te meten. Hij lijkt een weerstand van 0 Ω te zijn. Dat kan maar een paar dingen betekenen. Of het is een shunt weerstand die gebruikt wordt om de laadstroom te meten (maar dat lijkt me in dit geval vrij nutteloos), of het is een draadbrug die als discreet component is uitgevoerd omdat er niet genoeg ruimte of lagen in de PCB printsporen beschikbaar waren (maar gezien de ruime plaatsing van de onderdelen is dat ook niet aannemelijk), of het is een zekering. En dat laatste ligt nog wel het meest voor de hand. En ook waarom dan juist dat onderdeel in de kapotte logger defect is.
Weer vergelijk ik de twee loggers, maar nu door het betreffende component op het werkende exemplaar door te meten. Hij lijkt een weerstand van 0 Ω te zijn. Dat kan maar een paar dingen betekenen. Of het is een shunt weerstand die gebruikt wordt om de laadstroom te meten (maar dat lijkt me in dit geval vrij nutteloos), of het is een draadbrug die als discreet component is uitgevoerd omdat er niet genoeg ruimte of lagen in de PCB printsporen beschikbaar waren (maar gezien de ruime plaatsing van de onderdelen is dat ook niet aannemelijk), of het is een zekering. En dat laatste ligt nog wel het meest voor de hand. En ook waarom dan juist dat onderdeel in de kapotte logger defect is.
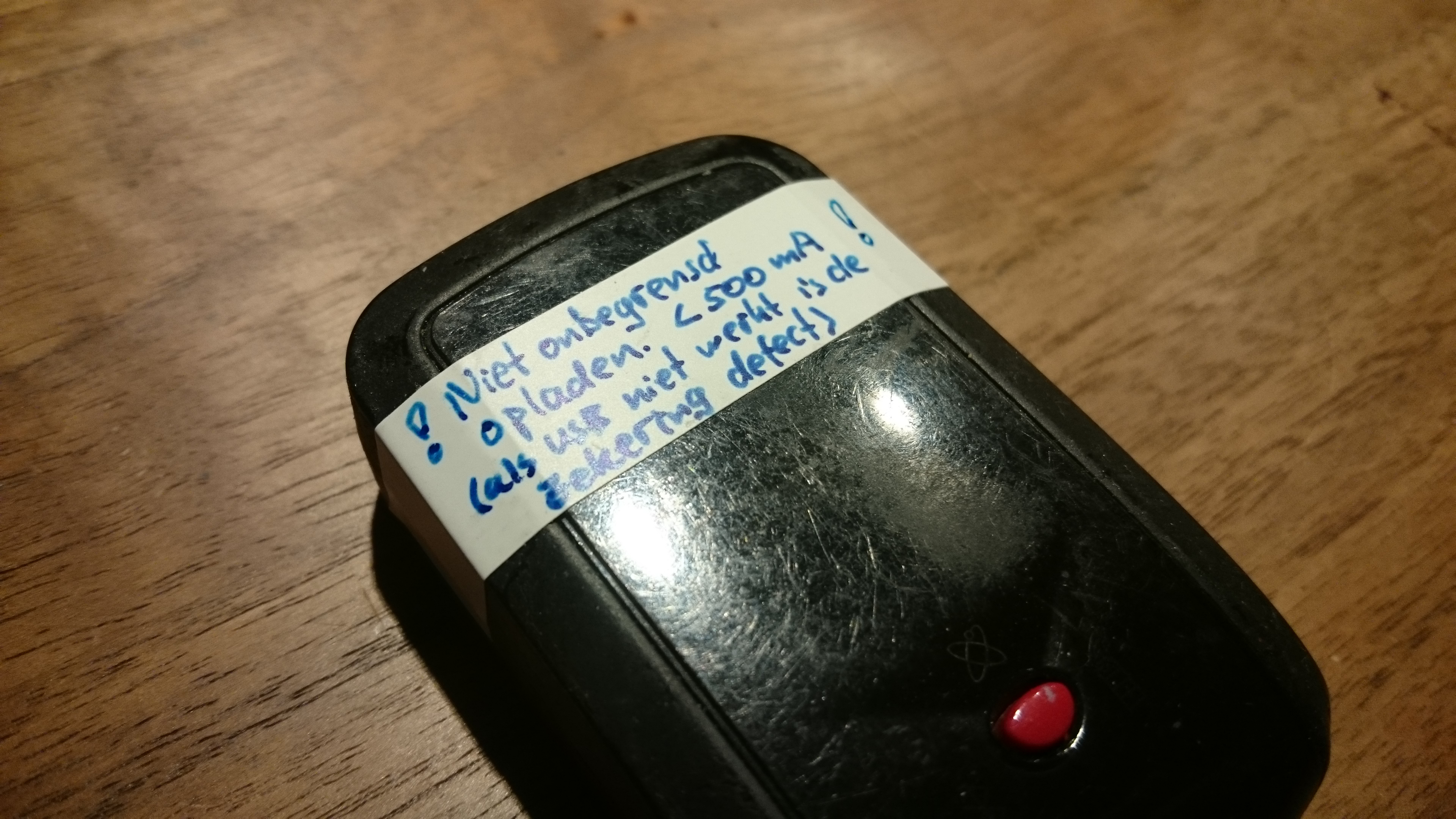 Dat werkte een maand, en toen was het oorspronkelijke probleem terug. Nogmaals openen van de GPS logger leerde dat de nieuwe zekering van 500 mA ook doorgebrand was. Oplossing 2 werd dan ook iets geavanceerder dan oplossing 1: een iets vrijgeviger zekering van 750 mA, en een sticker op de GPS logger dat hij niet aan een lader mag die meer dan 500 mA kan leveren. En zo doet hij het inmiddels al weer een jaar of 2.
Dat werkte een maand, en toen was het oorspronkelijke probleem terug. Nogmaals openen van de GPS logger leerde dat de nieuwe zekering van 500 mA ook doorgebrand was. Oplossing 2 werd dan ook iets geavanceerder dan oplossing 1: een iets vrijgeviger zekering van 750 mA, en een sticker op de GPS logger dat hij niet aan een lader mag die meer dan 500 mA kan leveren. En zo doet hij het inmiddels al weer een jaar of 2. Met de bijgeleverde software Qtravel kan je een aantal gegevens weglaten of toevoegen. Het grappige is overigens dat je niet alles kan instellen, maar als je met een ander programma de gelogde gegevens aanpast, dat dan wel weer door Qtravel wordt weergegeven.
Met de bijgeleverde software Qtravel kan je een aantal gegevens weglaten of toevoegen. Het grappige is overigens dat je niet alles kan instellen, maar als je met een ander programma de gelogde gegevens aanpast, dat dan wel weer door Qtravel wordt weergegeven.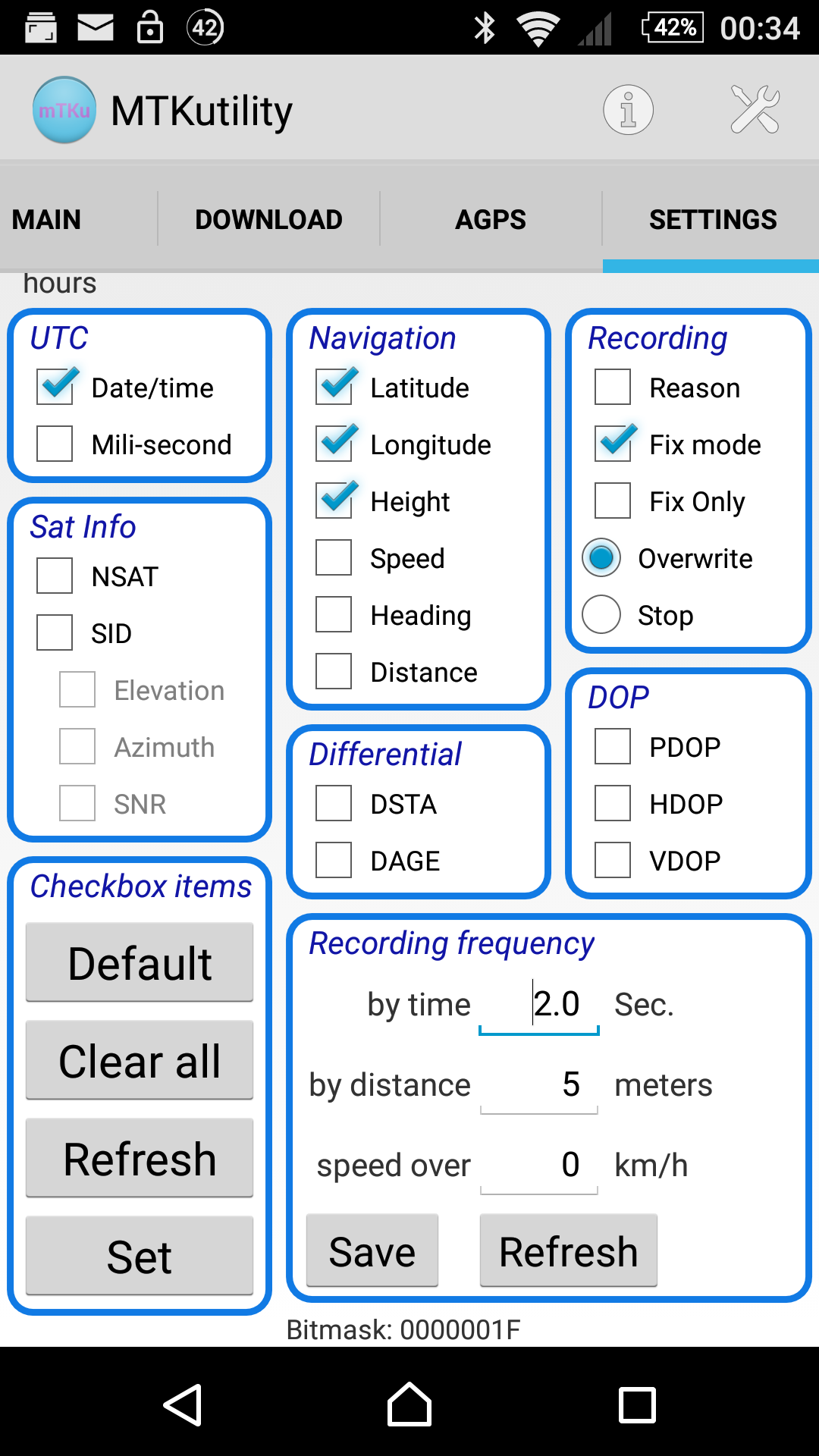 Een ander programmaatje is bijvoorbeeld MTKutillity voor Android, of BT747, maar daarover later meer. Laten we niet afdwalen. Waar het om gaat is dat als je minder gegevens per gelogde positie opslaat, er simpelweg meer punten in het geheugen passen.
Een ander programmaatje is bijvoorbeeld MTKutillity voor Android, of BT747, maar daarover later meer. Laten we niet afdwalen. Waar het om gaat is dat als je minder gegevens per gelogde positie opslaat, er simpelweg meer punten in het geheugen passen. Alleen is de blauwe lijn in de grafiek een stuk strakker dan de rode, de berekende. Kennelijk weet de GPS zijn snelheid beter dan zijn locatie. Of wacht: de locatie wordt maar in een beperkt aantal decimalen -cijfers achter de komma- opgeslagen. Misschien ligt het daar aan? Een regel uit de log bevat
Alleen is de blauwe lijn in de grafiek een stuk strakker dan de rode, de berekende. Kennelijk weet de GPS zijn snelheid beter dan zijn locatie. Of wacht: de locatie wordt maar in een beperkt aantal decimalen -cijfers achter de komma- opgeslagen. Misschien ligt het daar aan? Een regel uit de log bevat 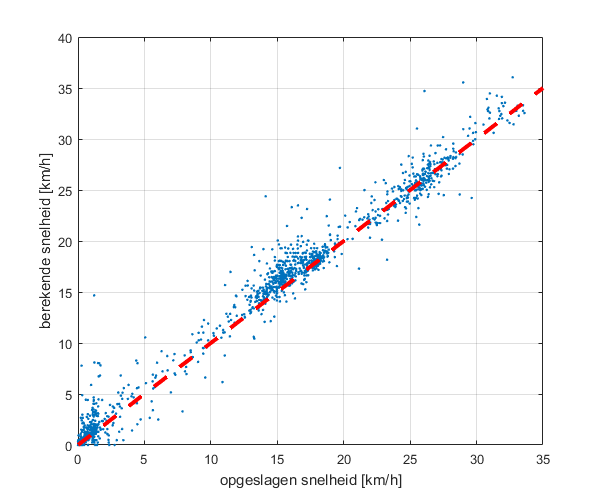 Opvallend genoeg is de door de GPS gemeten snelheid dikwijls lager dan de berekende snelheid, méér dan je op basis van de nauwkeurigheid van de graden-representatie zou verwachten. Een andere test, waarbij ik kijk naar de gelogd afstand tussen de punten, laat zien dat het dáár niet aan ligt; de door Pythagoras berekende afstand tussen elk paar punten is met een afwijking van hooguit 0.1 m, de verklaarbare afwijking, gelijk aan de door de GPS gelogde. Mijn conclusie is daarom dat de variatie in de tijd zit. Jitter op de regelmaat van de klok. Ik zou dat kunnen onderzoeken als ik ook de millisecondes van elk sample zou laten opslaan; het is me ook al opgevallen dat ik als ik de waarde van ‘fix every… ms’ op bijvoorbeeld 200 zet in plaats van 1000 (kan via BT747), er meerdere punten met dezelfde timestamp worden bewaard; het is dus niet zo dat er precies elke seconde iets gebeurt in het ding, het kan best vaker zijn, óf onregelmatiger. Je kan op die manier trouwens ook een BT-1000EX maken van de 1000XT, door hem op “fix every 100ms” te zetten, en “log every 1.0m”, en je krijgt bij snelheden boven 10 m/s een datapunt met een frequentie van 10 Hz. Maar ik vind het wel goed zo. Afhankelijk van waar ik de gegevens voor ga gebruiken zal ik de gemeten snelheid al dan niet opslaan, door de logger tevoren te configureren.
Opvallend genoeg is de door de GPS gemeten snelheid dikwijls lager dan de berekende snelheid, méér dan je op basis van de nauwkeurigheid van de graden-representatie zou verwachten. Een andere test, waarbij ik kijk naar de gelogd afstand tussen de punten, laat zien dat het dáár niet aan ligt; de door Pythagoras berekende afstand tussen elk paar punten is met een afwijking van hooguit 0.1 m, de verklaarbare afwijking, gelijk aan de door de GPS gelogde. Mijn conclusie is daarom dat de variatie in de tijd zit. Jitter op de regelmaat van de klok. Ik zou dat kunnen onderzoeken als ik ook de millisecondes van elk sample zou laten opslaan; het is me ook al opgevallen dat ik als ik de waarde van ‘fix every… ms’ op bijvoorbeeld 200 zet in plaats van 1000 (kan via BT747), er meerdere punten met dezelfde timestamp worden bewaard; het is dus niet zo dat er precies elke seconde iets gebeurt in het ding, het kan best vaker zijn, óf onregelmatiger. Je kan op die manier trouwens ook een BT-1000EX maken van de 1000XT, door hem op “fix every 100ms” te zetten, en “log every 1.0m”, en je krijgt bij snelheden boven 10 m/s een datapunt met een frequentie van 10 Hz. Maar ik vind het wel goed zo. Afhankelijk van waar ik de gegevens voor ga gebruiken zal ik de gemeten snelheid al dan niet opslaan, door de logger tevoren te configureren.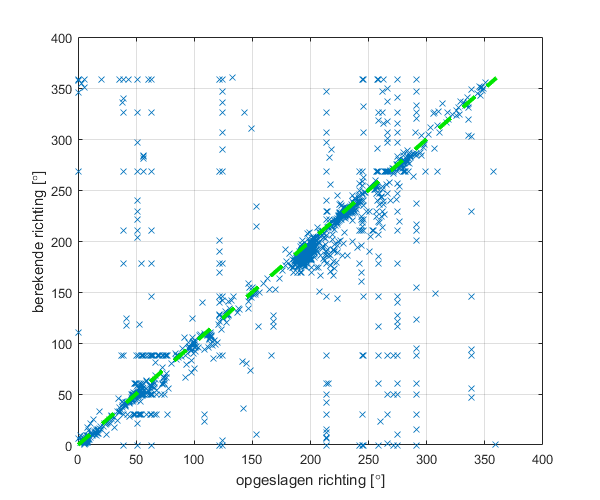 Dat lijkt aardig te kloppen, qua trend, maar er zitten ook veel afwijkingen in. Idealiter zou het een strakke rechte lijn zijn (zoals de groene onderbroken lijn aangeeft) maar dat is dus niet zo. Alleen is het hier prima te verklaren uit de resolutie van de opgeslagen locatie waardes -het beperkte aantal cijfers achter de komma-. Bij lage snelheden zijn de afstanden tussen de punten relatief klein ten opzichte van de discretisatiestappen. En dat kan een enorme afwijking bij die punten opleveren voor de berekende koers.
Dat lijkt aardig te kloppen, qua trend, maar er zitten ook veel afwijkingen in. Idealiter zou het een strakke rechte lijn zijn (zoals de groene onderbroken lijn aangeeft) maar dat is dus niet zo. Alleen is het hier prima te verklaren uit de resolutie van de opgeslagen locatie waardes -het beperkte aantal cijfers achter de komma-. Bij lage snelheden zijn de afstanden tussen de punten relatief klein ten opzichte van de discretisatiestappen. En dat kan een enorme afwijking bij die punten opleveren voor de berekende koers.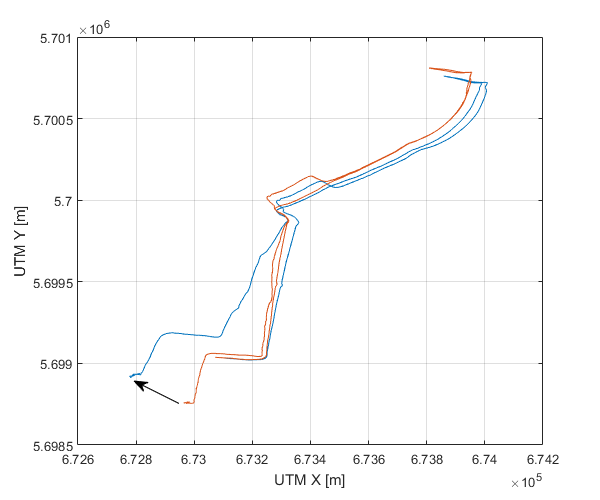 an zou ik deze drie SPEED, TRACK en DISTANCE loggen. Om de route gevolgde op de kaart te plotten, en gewoon te zien waar je liep en hoe hard en hoe hoog, dan is tijd en locatie plus hoogte genoeg om alles met voldoende nauwkeurigheid uit te halen. Wat in elk geval niet werkt is uit de snelheid en richting de gelopen route bepalen, want dan kom je door opgestapelde afrondingsfouten heel ergens anders uit. Dus de locatie moet altijd onderdeel van de gelogde gegevens zijn.
an zou ik deze drie SPEED, TRACK en DISTANCE loggen. Om de route gevolgde op de kaart te plotten, en gewoon te zien waar je liep en hoe hard en hoe hoog, dan is tijd en locatie plus hoogte genoeg om alles met voldoende nauwkeurigheid uit te halen. Wat in elk geval niet werkt is uit de snelheid en richting de gelopen route bepalen, want dan kom je door opgestapelde afrondingsfouten heel ergens anders uit. Dus de locatie moet altijd onderdeel van de gelogde gegevens zijn. Maar over het algemeen is het geheugen niet de beperkende factor, tenzij je een maand vakantie in één keer wilt loggen. Doorgaans is de batterij eerder leeg. De bijgeleverde batterij van het merk Helix (HX-N3650A-G) houdt het tussen de 34 en 38 uur vol; in de loop van de jaren gaat hij wat achteruit, wat te verwachten is. Een nieuwere Nokia BL-6C, uitwisselbaar, houdt het bijna 43 uur vol. Genoeg voor een bizar lange adventure race. Ik vroeg me alleen af of het nog uit maakt hoe vaak hij logt. Want allereerst kost het beschrijven van flash geheugen wat energie, dus hoe meer er gelogd wordt, hoe sneller de batterij leeg is, en ten tweede zou hij wel een in een slaapstand kunnen gaan tussen de punten in, als ik het update interval langer maak. Dus dat heb ik getest.
Maar over het algemeen is het geheugen niet de beperkende factor, tenzij je een maand vakantie in één keer wilt loggen. Doorgaans is de batterij eerder leeg. De bijgeleverde batterij van het merk Helix (HX-N3650A-G) houdt het tussen de 34 en 38 uur vol; in de loop van de jaren gaat hij wat achteruit, wat te verwachten is. Een nieuwere Nokia BL-6C, uitwisselbaar, houdt het bijna 43 uur vol. Genoeg voor een bizar lange adventure race. Ik vroeg me alleen af of het nog uit maakt hoe vaak hij logt. Want allereerst kost het beschrijven van flash geheugen wat energie, dus hoe meer er gelogd wordt, hoe sneller de batterij leeg is, en ten tweede zou hij wel een in een slaapstand kunnen gaan tussen de punten in, als ik het update interval langer maak. Dus dat heb ik getest. Dit is de bijgeleverde software, die je ook los kan downloaden. Alleen heb je een product-key nodig om het te gebruiken, dus zonder een Qstarz logger heb je er niet veel aan. Het is wel de enige mogelijkheid die ik heb gevonden om een schema in te stellen van hoe laat tot hoe laat en op welke dagen van de week de logger actief moet zijn. Maar om alle logging opties in te kunnen stellen heb je weer andere, zoals onderstaande, software nodig.
Dit is de bijgeleverde software, die je ook los kan downloaden. Alleen heb je een product-key nodig om het te gebruiken, dus zonder een Qstarz logger heb je er niet veel aan. Het is wel de enige mogelijkheid die ik heb gevonden om een schema in te stellen van hoe laat tot hoe laat en op welke dagen van de week de logger actief moet zijn. Maar om alle logging opties in te kunnen stellen heb je weer andere, zoals onderstaande, software nodig.


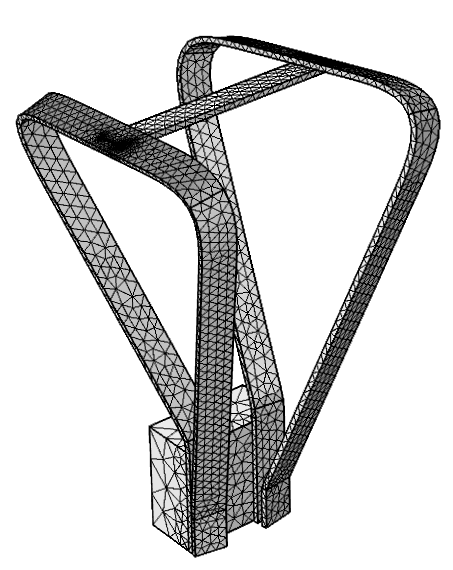
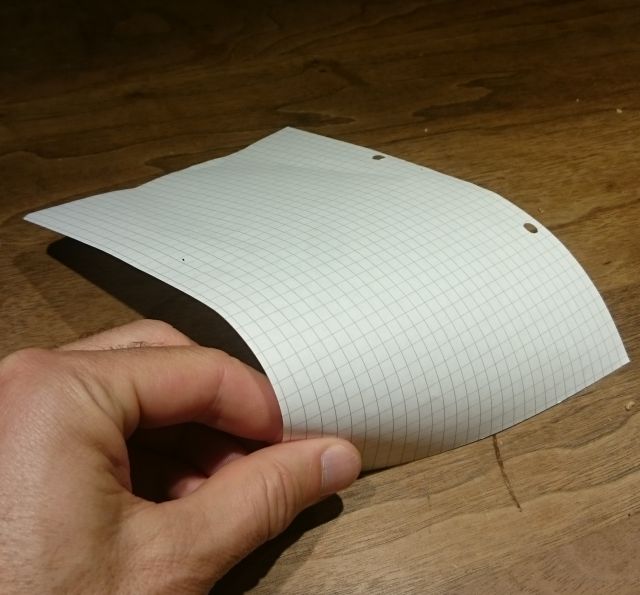
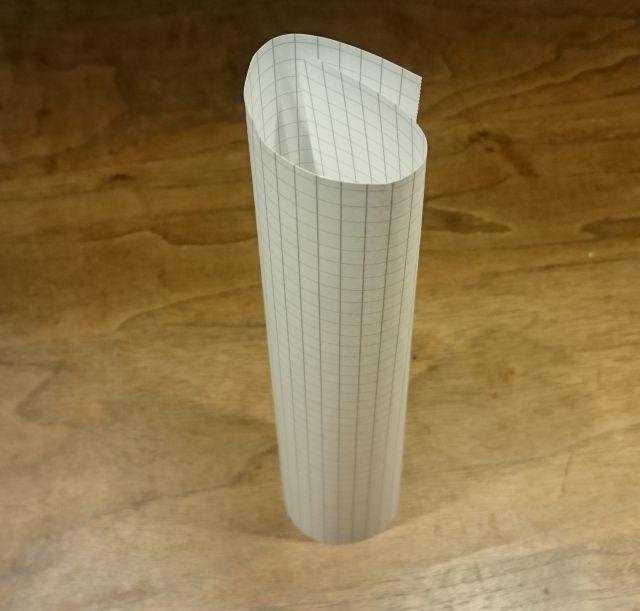
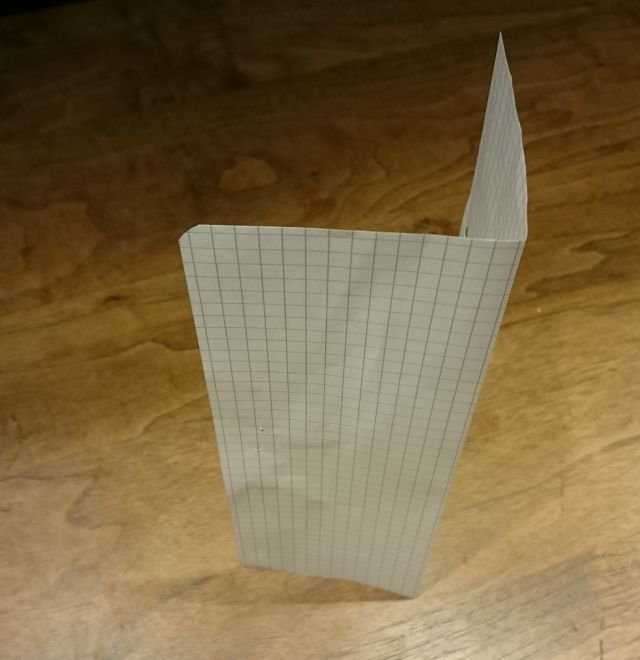
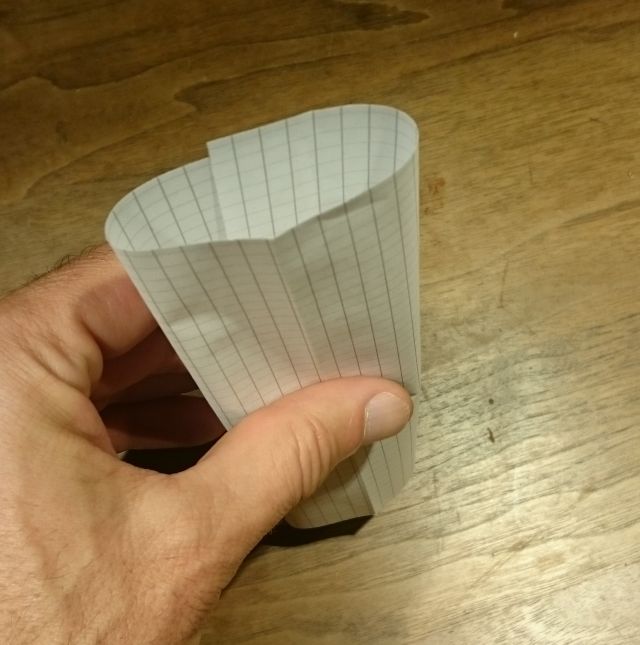

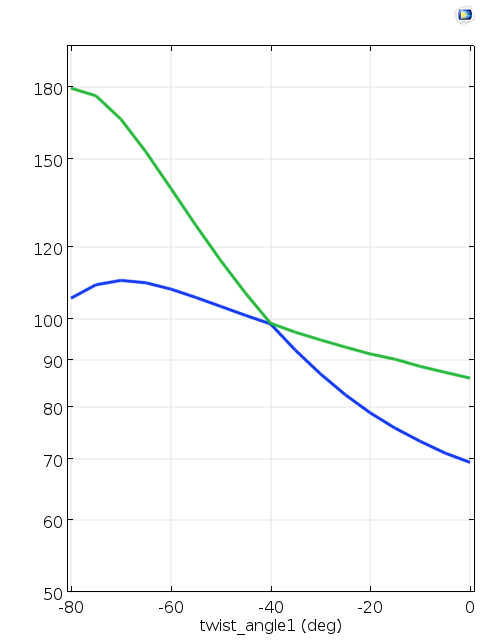





 No looking for blue labels like at the Midwinterrun, here at The hARz, but chipping with an SI, a SportIdent race-bib. That’s nice and easy, as we do not have to write down anything. On to the next point. Like ants swarming onto a pile of food, 180 Adventure Racers try to make their way to the summit. CP 1 is at the top, and along the way up there are CP 3 and CP 2.
No looking for blue labels like at the Midwinterrun, here at The hARz, but chipping with an SI, a SportIdent race-bib. That’s nice and easy, as we do not have to write down anything. On to the next point. Like ants swarming onto a pile of food, 180 Adventure Racers try to make their way to the summit. CP 1 is at the top, and along the way up there are CP 3 and CP 2.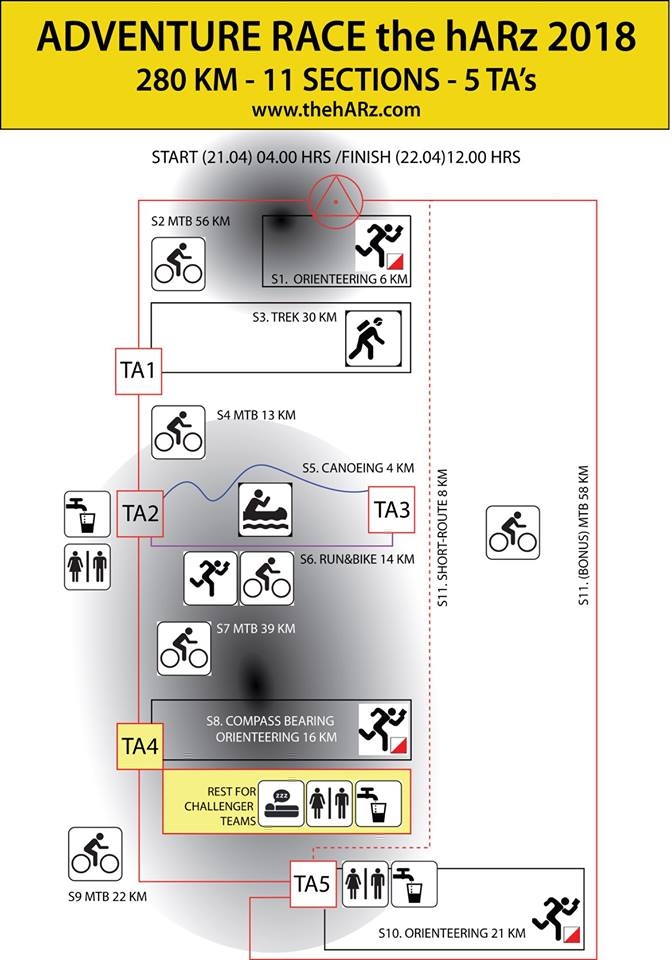
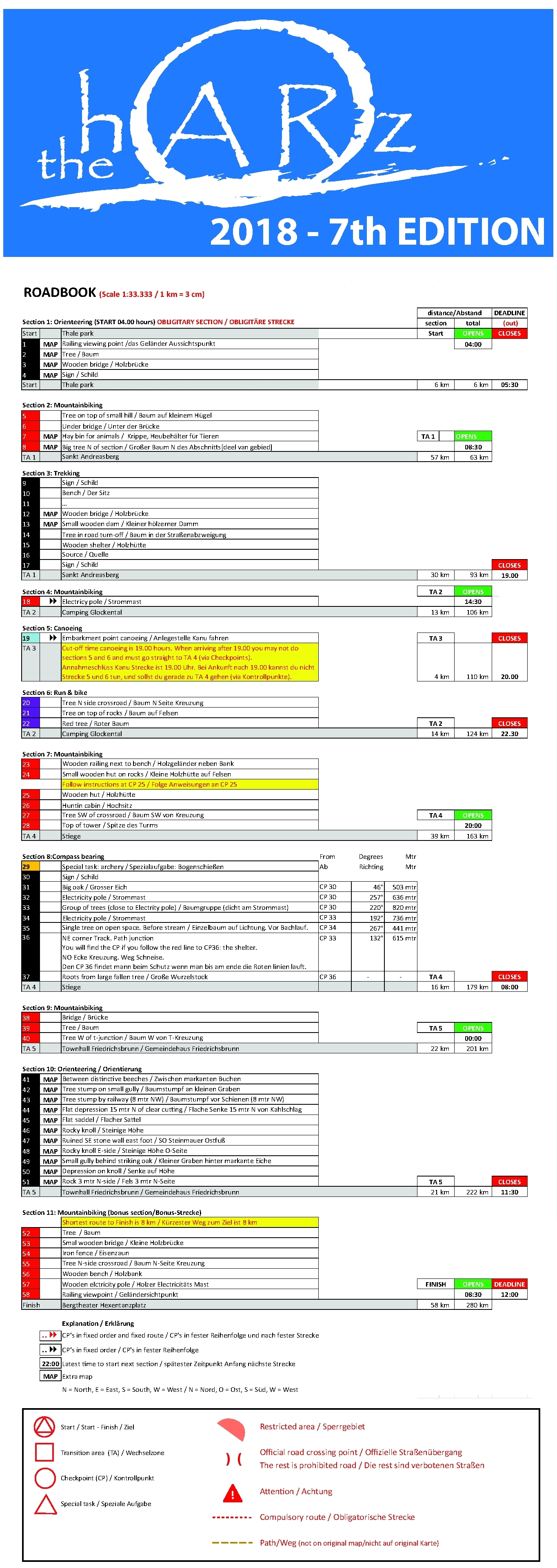










 Just before the climb, organizer Winfried was enjoying the view of the exhausted teams passing by, without any regrets. On our gums we trudge uphill, but then finally our bikes can be dropped down, our water reserve replenished, the sanitary facilities filled, and a tune whistled. Because we are at TA1, which means the first transition area (and there is Winfried again). The next stage is called a hike .
Just before the climb, organizer Winfried was enjoying the view of the exhausted teams passing by, without any regrets. On our gums we trudge uphill, but then finally our bikes can be dropped down, our water reserve replenished, the sanitary facilities filled, and a tune whistled. Because we are at TA1, which means the first transition area (and there is Winfried again). The next stage is called a hike .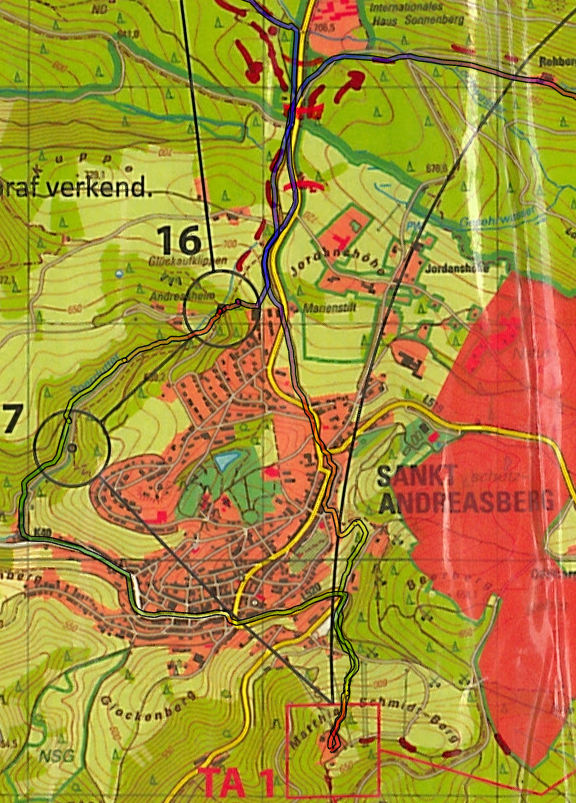

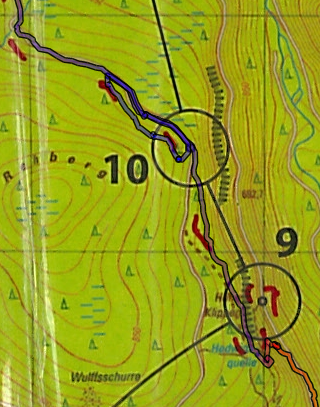




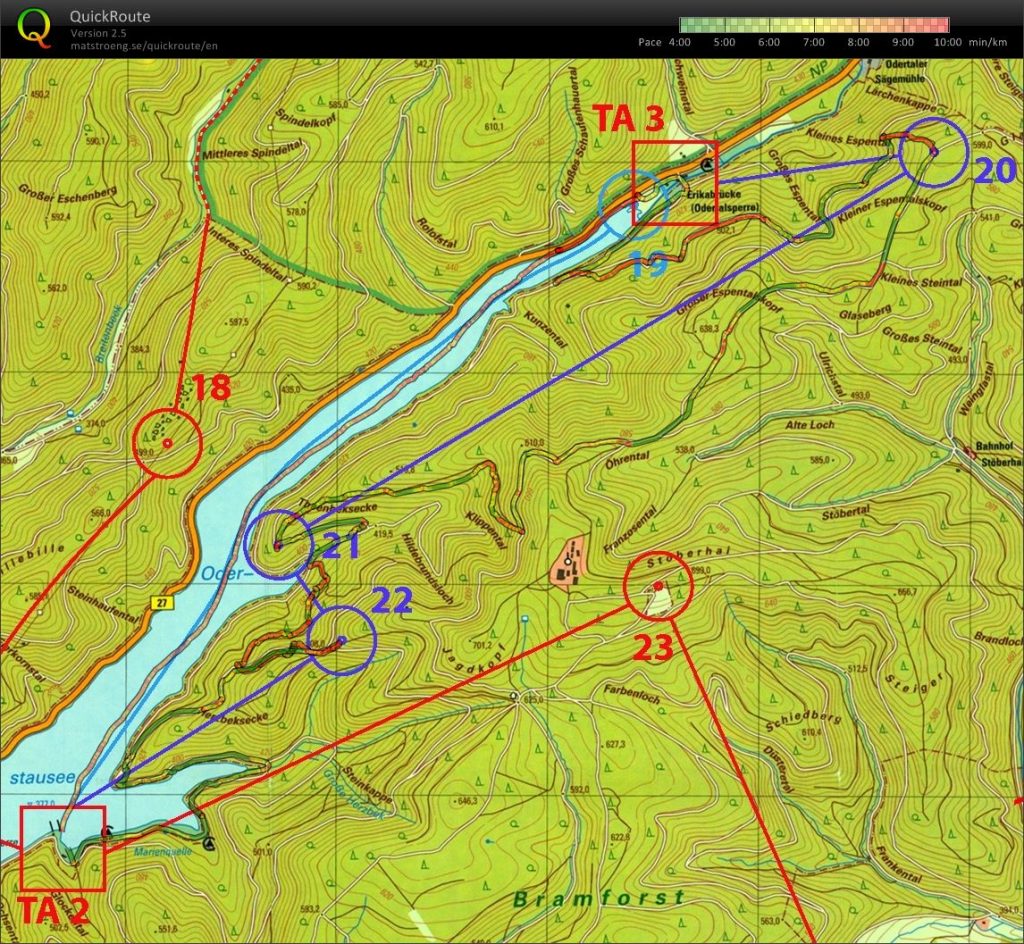
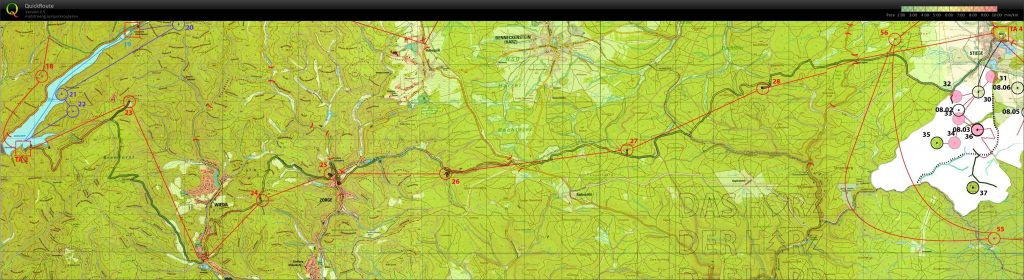





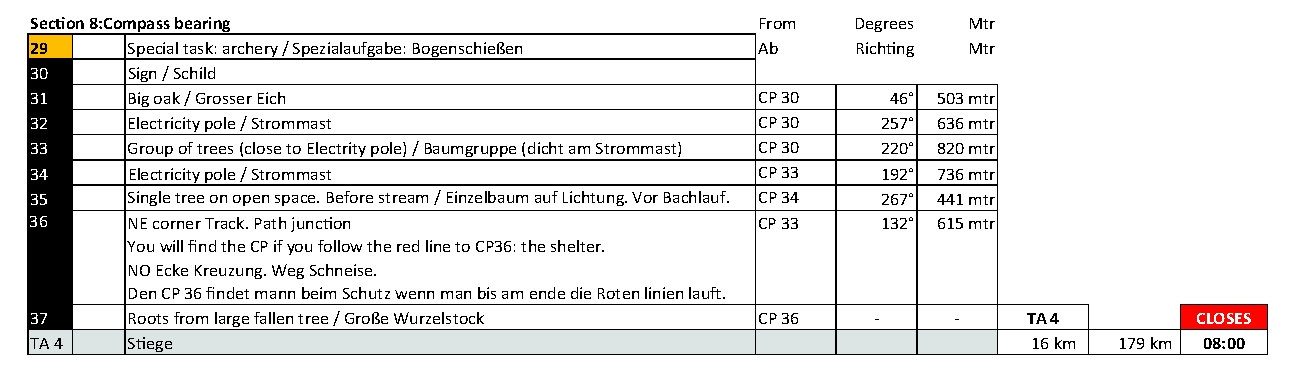
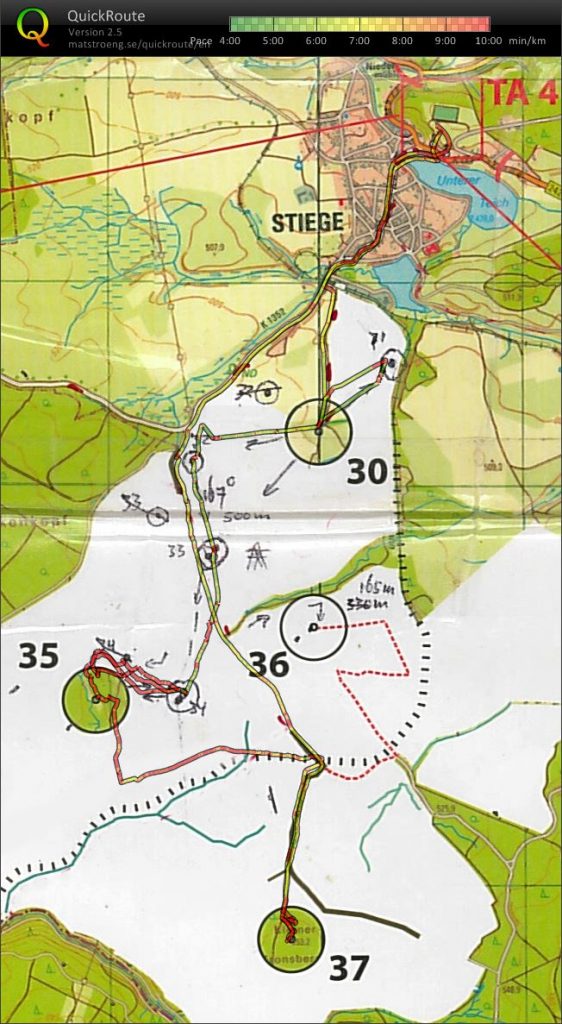


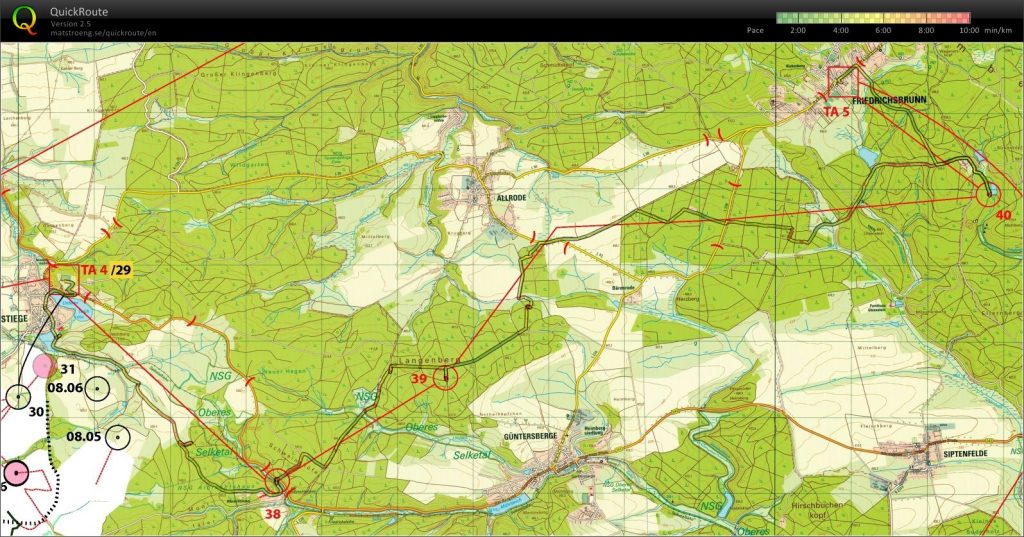


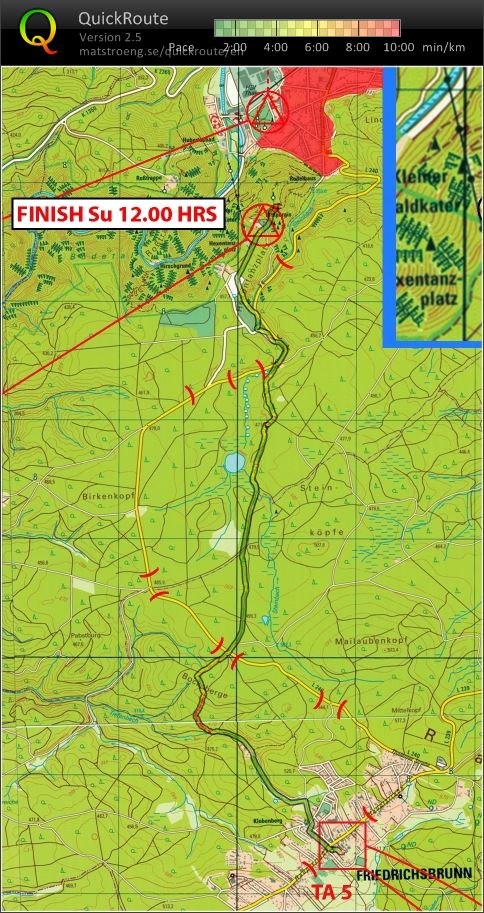

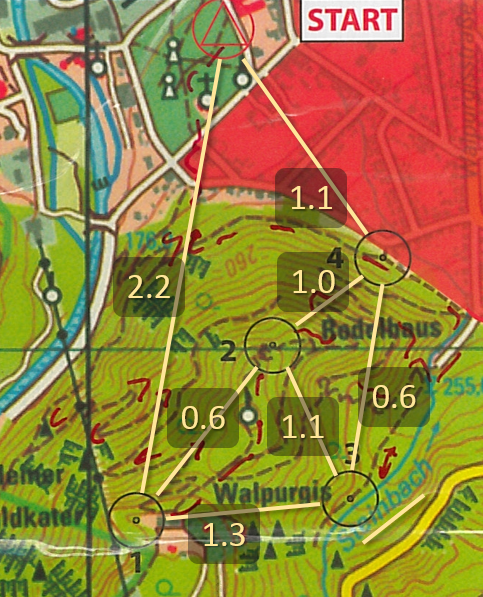


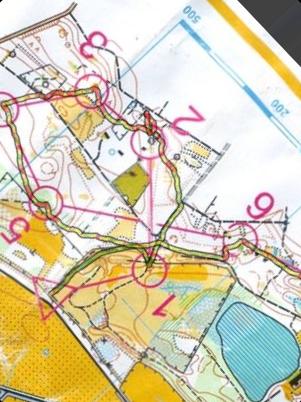
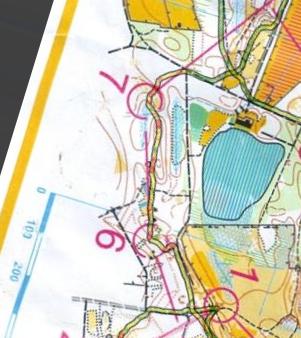


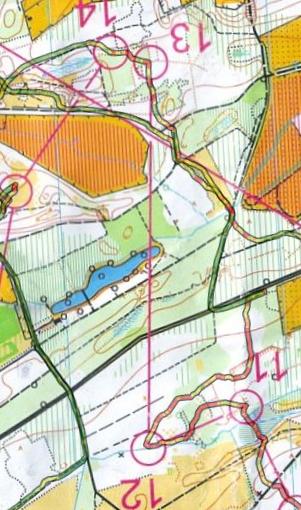

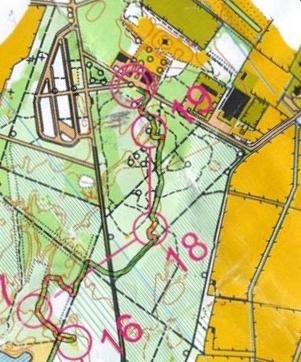









![220px-VFPt_cylindrical_magnet_thumb.svg[1]](http://jgeo.nl/o/wp-uploads/jgeo.nl/2013/01/220px-VFPt_cylindrical_magnet_thumb.svg1_.png)
 De vraag blijft welke lolbroek in het Nederlands “zuidpool” met een Z heeft geschreven, terwijl zowel vanuit het Oosten als het Westen de Z een N is.
De vraag blijft welke lolbroek in het Nederlands “zuidpool” met een Z heeft geschreven, terwijl zowel vanuit het Oosten als het Westen de Z een N is.










 Eindelijk weer eens een nacht-OL gelopen. Leuk dat het was! Een stuk beter dan vorige week, ging het, en dat scheelt. Eigenlijk maar een enkele kleine foutjes gemaakt, maar allemaal acceptabel. Niet echt vanwege verkeerde route-keuzes.
Eindelijk weer eens een nacht-OL gelopen. Leuk dat het was! Een stuk beter dan vorige week, ging het, en dat scheelt. Eigenlijk maar een enkele kleine foutjes gemaakt, maar allemaal acceptabel. Niet echt vanwege verkeerde route-keuzes.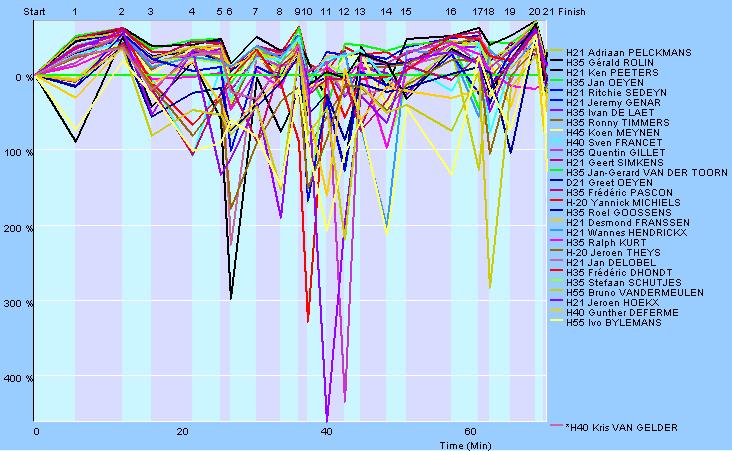







 Het klinkt eenvoudiger dan het is: neem een stuk elastiek, naai er klittenband op, en verder een zakje van gaas en nog wat elastiek er omheen, stop er een GPS-tracklogger in, en gaan.
Het klinkt eenvoudiger dan het is: neem een stuk elastiek, naai er klittenband op, en verder een zakje van gaas en nog wat elastiek er omheen, stop er een GPS-tracklogger in, en gaan.


